电机转矩-转速曲线
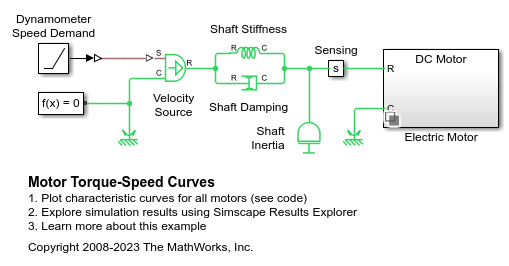
此示例对比了五种不同电机类型的转矩-转速特性。要选择电机类型,请右键点击 Electric Motor 模块,然后从上下文菜单中选择模块参数(子系统)。在新窗口中,使用标签模式活动选择项参数指定所需的电机。所有电机的尺寸大致按照相同的额定机械功率设计。
要运行并比较全部五种电机,请点击超链接以绘制特性曲线。在为给定应用选择电机时,了解电机的转矩-转速和功率-转速行为至关重要。要根据数据手册值比较特定电机,请修改此模型及其支持库。关键参数通常包括启动转矩(零 RPM 时的转矩)、峰值/最大功率和对应的 RPM。
DC 电机 (DC Motor) 具有线性转矩-转速特性,功率在转速大约为最大 RPM 的一半时达到峰值。并励电机 (Shunt Motor) 同样具有线性转矩-转速特性和类似形状的功率曲线。实际上,并励电动机无法以其峰值功率或转矩运行,因为所涉及的电流太大。这种特定电机设计为在 4000 rpm 转速下提供 50 瓦的最大机械功率。
通用电机 (Universal Motor) 的转矩-转速特性遵循 1/x^2 关系。在这种电机中,通过实际电流值实现相对较大的启动转矩。功率在转速约为 6000 rpm 时达到峰值。感应电机 (Induction Motor) 的转矩-转速曲线具有该类电机的典型特征,其启动转矩较低,且峰值转矩出现在略低于同步转速的位置。请注意,图中同时绘制了电机区域和发电区域。
伺服电机 (Servomotor) 是一款受控伺服电机,最大转矩为 0.25 Nm。转矩需求设置为 0.2 Nm,该转矩可在转速不超过 4350 rpm 时实现,超过此转速将受到包络极限的约束。要查看允许的转矩包络,请将 Electric Motor 变体选择项设置为 'Servomotor',打开 Electric Motor 模块,然后双击 Servomotor 模块。包络由前两个模块参数定义。
模型
来自 Simscape 记录的仿真结果
下图显示了不同类型电机的特性曲线。


另请参阅
DC Motor | Simplified Induction Motor | Motor & Drive (System Level) | Shunt Motor | Universal Motor