MPU6050 IMU Sensor
Measure acceleration, angular rate, and temperature along axes of MPU-6050 sensor
Since R2026a
Libraries:
STM32 Microcontroller Blockset /
Sensors /
IMU Sensors
STM32 Microcontroller Blockset /
(Legacy) STM32 MBED Based Boards /
MBED Based Sensors
Description
The MPU6050 IMU Sensor block reads data from the MPU-6050 sensor that is connected to the hardware.
The block outputs acceleration, angular rate, and temperature along the axes of the sensor. The block outputs acceleration and angular rate as a 3-by-1 double-precision array. The temperature data is output as a as a scalar double.
Note
The output from the MPU-6050 sensor may have a finite non-negligible offset value
except for the Temperature output. You may consider correcting this offset value for
such cases.
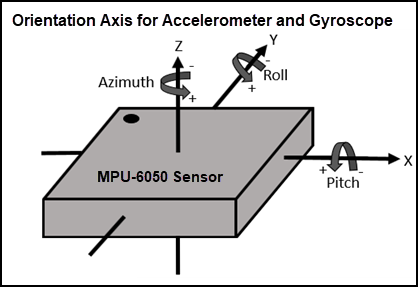
This diagram shows the default orientation of the x-, y-, and z-axes of the MPU-6050 sensor.
If you simulate a model that contains the MPU6050 IMU Sensor block without connecting it to the hardware, the block outputs zeros. For more information, see Block Produces Zeros or Does Nothing in Simulation.
Examples
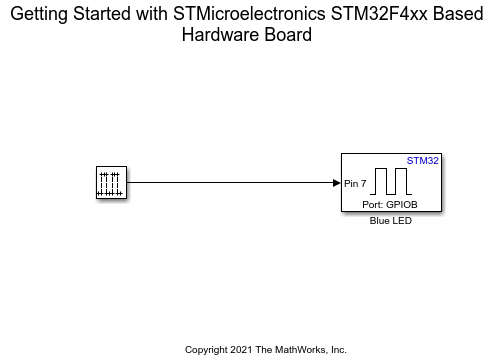
Get Started with STMicroelectronics STM32 Processor Based Boards
Run a Simulink model on STM32 processor.
Ports
Output
Parameters
Extended Capabilities
Version History
Introduced in R2026a