Fixed-Wing UAV Point Mass
Integrate fourth- or sixth-order point mass equations of motion in coordinated flight
Libraries:
UAV Toolbox /
Algorithms
Aerospace Blockset /
Equations of Motion /
Point Mass
Description
The Fixed-Wing Point Mass block integrates fourth- or sixth-order point mass equations of motion in coordinated flight.
Examples
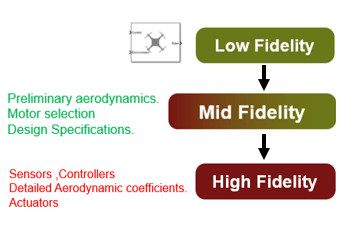
Transition from Low- to High-Fidelity UAV Models in Three Stages
Evolve your UAV plant model continuously to stay in sync with the latest information available.
Limitations
The flat Earth reference frame is considered inertial, an approximation that allows the forces due to the Earth's motion relative to the "fixed stars" to be neglected.
The block assumes that there is fully coordinated flight, that is, there is no side force (wind axes) and sideslip is always zero.
Ports
Input
Output
Parameters
Algorithms
The integrated equations of motion for the point mass are:
6th order equations:
4th order equations:
where:
m — Mass.
g — Gravitational acceleration.
W — Weight ( m*g).
L — Lift force.
D — Drag force.
T — Thrust force.
α — Angle of attack.
μ — Angle of bank.
γai — Input port value for the flight path angle.
V — Airspeed, as measured on the aircraft, with respect to the air mass. It is also the magnitude of vector Va.
Vw — Steady wind vector.
Subscript a — For the variables, denotes that they are with respect to the steadily moving air mass:
γa — Flight path angle.
χa — Heading angle.
Xa — Position [East, North, Up].
Subscript e — Flat Earth inertial frame such that so Xe is the position on the Earth after correcting Xa for the air mass movement.
Additional outputs are:
where:
The four-quadrant inverse tangent (
atan2) calculates the heading angle.The groundspeed, G, is the speed over the flat Earth (a 2-D projection).
Extended Capabilities
Version History
Introduced in R2021a