Simulate Multiple Fixed-Wing UAVs in Simulink Using System Objects
This example shows how to simulate a multiple-UAV in a waypoint-following mission in Simulink® by using System objects to implement multiple instances. In addition, this example shows how to visualize multiple UAVs and waypoints using the UAV Animation block.
To learn more about how to use System objects, see What Are System Objects? and System Design in Simulink Using System Objects (Simulink).
Create UAV Waypoints
Create waypoints for five UAVs. First, define the number of UAVs in the simulation.
numUAVs = 5;
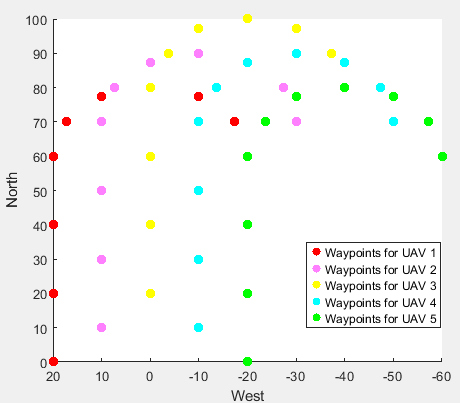
In this example, each UAV has 10 waypoints. All UAVs first fly in a straight line, followed by a semicircular U-turn as illustrated in this image.
Create an empty array to store all the waypoints.
wayPoints = zeros(10,3,numUAVs);
Create waypoints for each UAV in the north-east-down (NED) frame, in meters.
wayPoints1 = [0 -20 0; ... 20 -20 0; ... 40 -20 0; ... 60 -20 0; ... 70 -17.32 0; ... 77.32 -10 0; ... 80 0 0; ... 77.32 10 0; ... 70 17.32 0; ... 60 20 0]; wayPoints2 = [10 -10 0; ... 30 -10 0; ... 50 -10 0; ... 70 -10 0; ... 80 -7.32 0; ... 87.32 0 0; ... 90 10 0; ... 87.32 20 0; ... 80 27.32 0; ... 70 30 0]; wayPoints3 = [20 0 0; ... 40 0 0; ... 60 0 0; ... 80 0 0; ... 90 3.68 0; ... 97.32 10 0; ... 100 20 0; ... 97.32 30 0; ... 90 37.32 0; ... 80 40 0]; wayPoints4 = [10 10 0; ... 30 10 0; ... 50 10 0; ... 70 10 0; ... 80 13.68 0; ... 87.32 20 0; ... 90 30 0; ... 87.32 40 0; ... 80 47.32 0; ... 70 50 0]; wayPoints5 = [0 20 0; ... 20 20 0; ... 40 20 0; ... 60 20 0; ... 70 23.68 0; ... 77.32 30 0; ... 80 40 0; ... 77.32 50 0; ... 70 57.32 0; ... 60 60 0];
Populate the waypoints array.
wayPoints(:,:,1) = wayPoints1; wayPoints(:,:,2) = wayPoints2; wayPoints(:,:,3) = wayPoints3; wayPoints(:,:,4) = wayPoints4; wayPoints(:,:,5) = wayPoints5;
Creates Bus Signal Definitions
Create bus signal definitions for the state, control, and environment signals for the guidance models, and store them to the busSignal.sldd data dictionary by using the exampleHelperMultiUAVSetupScript helper function.
exampleHelperMultiUAVSetupScript
Model Overview
The formationFlightSimulation.slx Simulink model consists of these main parts:
Multi-Instance Waypoint Follower— MATLAB System block that implements multiple instances of theuavWaypointFollowerSystem object™ from UAV Toolbox, providing guidance logic for all the UAVs.Multi-Instance Heading Controller— MATLAB Function block that calculates the heading control input for all UAVs.Multi-Instance Guidance Model— Subsystem that implements multiple instances of themultiFixedwingDerivativeSystem object from UAV Toolbox, providing a low-fidelity model for all the UAVs. As an alternative, you can replace this subsystem with the Multi-Instance Guidance Model block.UAV AnimationBlock — Animates the flight path, waypoints, and lookahead points of all UAVs.
Both uavWaypointFollower and multiFixedwingDerivative System objects have multiple defined object functions and properties. The properties that appear on their MATLAB System block masks are nontunable, which means you cannot change them once you instantiate the objects. Some of the important methods of the system object are:
resetImpl - This method initializes multiple
uavWaypointFollowerobjects, with appropriate properties, once the system object has been initialized.stepImpl - This method loops over each of the
uavWaypointFollowerobjects and computes the look-ahead point and desired course for each of them.
Note: For this example, the Multi-Instance Waypoint Follower and Multi-Instance Guidance Model blocks support simulation using only interpreted execution.
Open the formationFlightSimulation.slx Simulink model. To set the properties of the waypoint follower for each UAV, open the mask for the Multi-Instance Waypoint Follower block. Select Source code to look at the underlying System object.
open_system("formationFlightSimulation")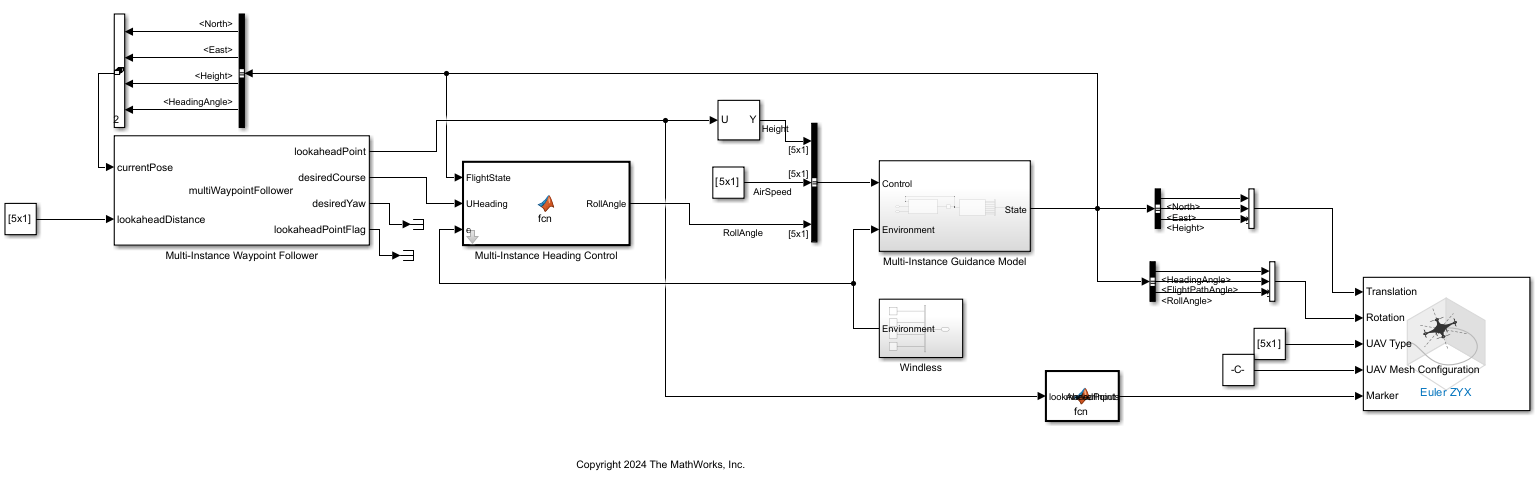
Run Simulation
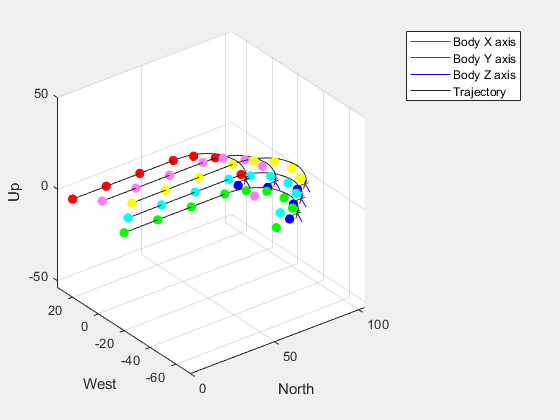
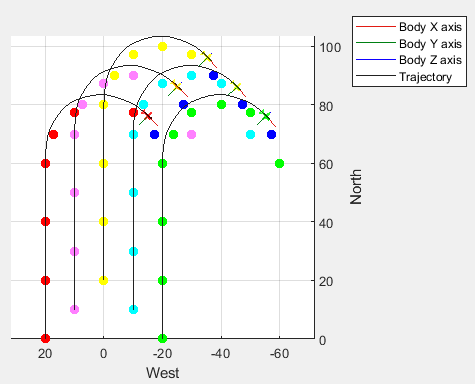
Run the Simulink model to simulate the formation flight. The UAV Animation block generates an animation of all the UAVs in formation, with their corresponding trajectories, waypoints, and look-ahead points.
sim("formationFlightSimulation");