Constant Radius
Libraries:
Vehicle Dynamics Blockset /
Vehicle Scenarios /
Drive Cycle and Maneuvers
Description
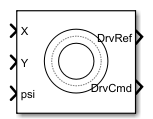
The Constant Radius block generates an open-loop longitudinal velocity
reference and a reference pose using vehicle feedback to track a constant radius path, which
is helpful to characterize a vehicle’s roll and understeer responses, usually at various
speeds. You can use these references directly with the Predictive Driver
block with the Lateral control type, controlTypeLat parameter set to
Stanley. You can also vary the radius and direction of travel and
optionally stop the simulation at a specified lateral acceleration limit.
Ports
Input
Output
Driver reference data, returned as a bus containing these block values.
| Signal | Description | Units |
|---|---|---|
| Longitudinal reference velocity | m/s |
| Lateral reference displacement | m |
| Vehicle global longitudinal reference position | m |
| Vehicle global lateral reference position | m |
| Vehicle global yaw reference position | rad |
| Reference path curvature | 1/m |
| Reference path curvature gradient | 1/m^2 |
Data Types: bus
Driver command data, returned as a bus containing these block values.
| Signal | Description | Units | |
|---|---|---|---|
|
| Boolean signal used to override driver model steering commands | one |
| Handwheel angle | one | |
| Boolean signal used to override driver model steering commands
with zero when value is | one | |
| Boolean signal used to hold the current driver model steering
output when | one | |
|
| Boolean signal used to override driver model acceleration commands | one |
| Normalized accelerator input | one | |
| Boolean signal used to hold the current driver model acceleration
output when | one | |
| Boolean signal used to override driver model acceleration
commands with zero when value is | one | |
|
| Boolean signal used to override driver model deceleration commands | one |
| Normalized decelerator or brake input | one | |
| Boolean signal used to hold the current driver model deceleration
output when | one | |
| Boolean signal used to override driver model deceleration
commands with zero when value is | one | |
| Normalized handbrake or park brake input | one | |
|
| Command to specify the transmission mode | one |
| Command to specify manual gear number or automatic transmission shifter position | one | |
| Command to upshift | one | |
| Command to downshift | one | |
| Normalized clutch open command for manual transmissions | one | |
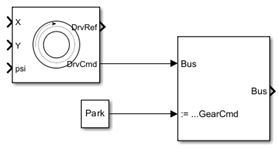
Note
By default, the TransCmd bus is not actively used. Use a
Bus Assignment block to override the
TransCmd bus to customize and extend the scenario.
Data Types: bus