Rotational Brake

Libraries:
Vehicle Dynamics Blockset /
Brakes
Description
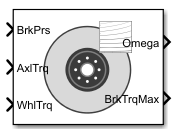
The Rotational Brake block implements a rotational frictional brake actuator. The brake implementation is similar to that of the Combined Slip Wheel 2DOF block. Use this block to specify an external maximum brake torque to interact with one of these tire models that does not have an integrated brake model:
Combined Slip Wheel CPI model or Combined Slip Wheel STI model
Simscape™ Multibody™ model
Third-party tire model
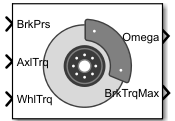
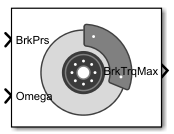
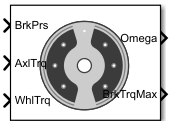
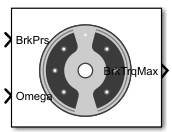
The Rotational Brake block supports four brake types with or without a rotational degree of freedom.
| Block | Brake Type Setting | Rotation type Setting | Configuration | Brake Implementation |
|---|---|---|---|---|
Disc Brake | Disc | Rotational inertia |
| Brake that converts the brake cylinder pressure into a braking torque. |
No inertia |
| |||
Drum Brake | Drum | Rotational inertia |
| Simplex drum brake that converts the applied force and brake geometry into a net braking torque. |
No inertia |
| |||
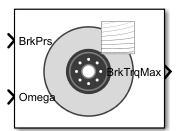
Mapped Brake | Mapped | Rotational inertia |
| Lookup table that is a function of the wheel speed and applied brake pressure. |
No inertia |
| |||
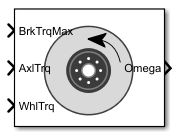
External Torque Brake | External Torque | Not applicable. Rotational inertia is always enabled. |
| User-specified maximum available braking torque for brake implementation. |
Brakes
If you specify the Brake Type parameter as
Disc, the block implements a disc brake. This figure shows
the side and front views of a disc brake.
A disc brake converts brake cylinder pressure from the brake cylinder into force. The disc brake applies the force at the brake pad mean radius.
The block uses these equations to calculate brake torque for the disc brake.
The equations use these variables.
| Variable | Value |
|---|---|
| T | Brake torque |
| P | Applied brake pressure |
| N | Wheel speed |
| Npads | Number of brake pads in disc brake assembly |
| μstatic | Disc pad-rotor coefficient of static friction |
| μ | Disc pad-rotor coefficient of kinetic friction |
| Ba | Brake actuator bore diameter |
| Rm | Mean radius of brake pad force application on brake rotor |
| Ro | Outer radius of brake pad |
| Ri | Inner radius of brake pad |
If you specify the Brake Type parameter as
Drum, the block implements a static (steady-state) simplex
drum brake. A simplex drum brake consists of a single two-sided hydraulic actuator and two
brake shoes. The brake shoes do not share a common hinge pin.
The simplex drum brake model uses the applied force and brake geometry to calculate a net torque for each brake shoe. The drum model assumes that the actuators and shoe geometry are symmetrical for both sides, allowing a single set of geometry and friction parameters to be used for both shoes.
The block implements equations that are derived from these equations in Fundamentals of Machine Elements.
The equations use these variables.
| Variable | Value |
|---|---|
| T | Brake torque |
| P | Applied brake pressure |
| N | Wheel speed |
| μstatic | Disc pad-rotor coefficient of static friction |
| μ | Disc pad-rotor coefficient of kinetic friction |
| Trshoe | Right shoe brake torque |
| Tlshoe | Left shoe brake torque |
| a | Distance from drum center to shoe hinge pin center |
| c | Distance from shoe hinge pin center to brake actuator connection on brake shoe |
| r | Drum internal radius |
| Ba | Brake actuator bore diameter |
| Θ1 | Angle from shoe hinge pin center to start of brake pad material on shoe |
| Θ2 | Angle from shoe hinge pin center to end of brake pad material on shoe |
If you specify the Brake Type parameter as
Mapped, the block uses a lookup table to determine the brake
torque.
The equations use these variables.
| Variable | Value |
|---|---|
| T | Brake torque |
Brake torque lookup table | |
| P | Applied brake pressure |
| N | Wheel speed |
| μstatic | Friction coefficient of drum pad-face interface under static conditions |
| μ | Friction coefficient of disc pad-rotor interface |
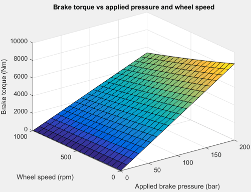
The lookup table for the brake torque, , is a function of applied brake pressure and wheel speed, where:
T is brake torque, in N·m.
P is applied brake pressure, in bar.
N is wheel speed, in rpm.
Ports
Input
Output
Parameters
To edit block parameters interactively, use the Property Inspector. From the Simulink® Toolstrip, on the Simulation tab, in the Prepare gallery, select Property Inspector.
Tire Options
Use the Brake Type parameter to select the brake type.
| Action | Brake Type Setting |
|---|---|
Implement brake that converts the brake cylinder pressure into a braking force. |
|
Implement simplex drum brake that converts the applied force and brake geometry into a net braking torque. |
|
Implement lookup table that is a function of the wheel speed and applied brake pressure. |
|
Specify maximum available braking torque for brake implementation. |
|
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | BrakeType |
| Values: | Disc | Drum | Mapped | External torque |
| Data Types: | char |
Specify the rotation type as Rotational inertia or
No inertia
Dependencies
To enable this parameter, set Brake type to
Disc, Drum, or
Mapped.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | rotType |
| Values: | Rotational inertia (default) | No inertia |
| Data Types: | char |
Wheel and Tire Parameters
Wheel inertia, specified as a scalar or
N-by-1 vector, in
kg·m2. If you specify a scalar, the block uses that value
for all wheels. If you specify a vector, you must specify vectors for the other
rotational parameters.
N is the number of wheels and must match the input signal dimensions.
Dependencies
To enable this parameter, set Rotation type to
Rotational inertia.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | Iyy |
| Values: | scalar | N-by-1 vector |
| Data Types: | char |
Axle viscous damping coefficient, specified as a scalar or
N-by-1 vector, in N·m·s/rad. If you specify a
scalar, the block uses that value for all wheels. If you specify a vector, you must
specify vectors for the other rotational parameters.
N is the number of wheels and must match the input signal dimensions.
Dependencies
To enable this parameter, set Rotation type to
Rotational inertia.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | br |
| Values: | scalar | N-by-1 vector |
| Data Types: | double |
Wheel initial angular velocity, specified as a
scalar or N-by-1 vector, in rad/s. If you
specify a scalar, the block uses that value for all wheels. If you specify a vector,
you must specify vectors for the other rotational parameters.
N is the number of wheels and must match the input signal dimensions.
Dependencies
To enable this parameter, set Rotation type to
Rotational inertia.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | omegao |
| Values: | scalar | N-by-1 vector |
| Data Types: | double |
Brake
Static friction coefficient, specified as a
scalar or N-by-1 vector, dimensionless. If you
specify a scalar, the block uses that value for all wheels. If you specify a vector,
you must specify vectors for the other brake parameters.
N is the number of wheels and must match the input signal dimensions.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | mu_static |
| Values: | 0.3 (default) | scalar | N-by-1 vector |
| Data Types: | double |
Kinematic friction coefficient, specified as a
scalar or N-by-1 vector, dimensionless. If you
specify a scalar, the block uses that value for all wheels. If you specify a vector,
you must specify vectors for the other brake parameters.
N is the number of wheels and must match the input signal dimensions.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | mu_kinetic |
| Values: | 0.2 (default) | scalar | N-by-1 vector |
| Data Types: | double |
Disc
Disc brake actuator bore, specified as a scalar
or N-by-1 vector, in m. If you specify a scalar,
the block uses that value for all wheels. If you specify a vector, you must specify
vectors for the other brake parameters.
N is the number of wheels and must match the input signal dimensions.
Dependencies
To enable this parameter, set Brake Type to
Disc.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | disc_abore |
| Values: | 0.05 (default) | scalar | N-by-1 vector |
| Data Types: | double |
Brake pad mean radius, specified as a scalar or
N-by-1 vector, in m. If you specify a scalar,
the block uses that value for all wheels. If you specify a vector, you must specify
vectors for the other brake parameters.
N is the number of wheels and must match the input signal dimensions.
Dependencies
To enable this parameter, set Brake Type to
Disc.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | Rm |
| Values: | 0.177 (default) | scalar | N-by-1 vector |
| Data Types: | double |
Number of brake pads, specified as a scalar or
N-by-1 vector, dimensionless. If you specify a
scalar, the block uses that value for all wheels. If you specify a vector, you must
specify vectors for the other brake parameters.
N is the number of wheels and must match the input signal dimensions.
Dependencies
To enable this parameter, set Brake Type to
Disc.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | num_pads |
| Values: | 2 (default) | scalar | N-by-1 vector |
| Data Types: | double |
Drum
Drum brake actuator bore, specified as a scalar
or N-by-1 vector, in m. If you specify a scalar,
the block uses that value for all wheels. If you specify a vector, you must specify
vectors for the other brake parameters.
N is the number of wheels and must match the input signal dimensions.
Dependencies
To enable this parameter, set Brake Type to
Drum.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | drum_abore |
| Values: | 0.0508 (default) | scalar | N-by-1 vector |
| Data Types: | double |
Shoe pin to drum center distance, in m.
Dependencies
To enable this parameter, set Brake Type to
Drum.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | drum_a |
| Values: | 0.123 (default) | scalar |
| Data Types: | double |
Shoe pin center to force application point distance, in m.
Dependencies
To enable this parameter, set Brake Type to
Drum.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | drum_c |
| Values: | 0.212 (default) | scalar |
| Data Types: | double |
Drum internal radius, in m.
Dependencies
To enable this parameter, set Brake Type to
Drum.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | drum_r |
| Values: | 0.15 (default) | scalar |
| Data Types: | double |
Shoe pin to pad start angle, in deg.
Dependencies
To enable this parameter, set Brake Type to
Drum.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | drum_theta1 |
| Values: | 0 (default) | scalar |
| Data Types: | double |
Shoe pin to pad end angle, in deg.
Dependencies
To enable this parameter, set Brake Type to
Drum.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | drum_theta2 |
| Values: | 126 (default) | scalar |
| Data Types: | double |
Mapped
Brake actuator pressure breakpoints, in bar.
Dependencies
To enable this parameter, set Brake Type to
Mapped.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | brake_p_bpt |
| Values: | vector |
| Data Types: | double |
Wheel speed breakpoints, in rpm.
Dependencies
To enable this parameter, set Brake Type to
Mapped.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | brake_n_bpt |
| Values: | vector |
| Data Types: | double |
The lookup table for the brake torque, , is a function of applied brake pressure and wheel speed, where:
T is brake torque, in N·m.
P is applied brake pressure, in bar.
N is wheel speed, in rpm.
Dependencies
To enable this parameter, set Brake Type to
Mapped.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | f_brake_t |
| Values: | vector |
| Data Types: | double |
Extended Capabilities
Version History
Introduced in R2024b