Code Generation for Depth Estimation from Stereo Video
This example shows how to use the MATLAB® Coder™ to generate C code for a MATLAB function, which uses the stereoParameters object produced by Stereo Camera Calibrator app or the estimateCameraParameters function. The example explains how to modify the MATLAB code in the Depth Estimation from Stereo Video example to support code generation.
This example requires a MATLAB Coder license.
Code Generation
You can learn about the basics of code generation using the MATLAB® Coder™ from the Introduction to Code Generation with Feature Matching and Registration example.
Restructuring the MATLAB Code for C Code Generation
MATLAB Coder requires MATLAB code to be in the form of a function in order to generate C code. Furthermore, the arguments of the function cannot be MATLAB objects.
This presents a problem for generating code from MATLAB code, which uses cameraParameters or stereoParameters objects, which are typically created in advance during camera calibration. To solve this problem, use the toStruct() method to convert the cameraParameters or the stereoParameters object into a struct. The struct can then be passed into the generated code.
The restructured code for the main algorithm of Depth Estimation from Stereo Video example resides in a function called depthEstimationFromStereoVideo_kernel.m. Note that depthEstimationFromStereoVideo_kernel is a function that takes a struct created from a stereoParameters object. Note also that it does not display the reconstructed 3-D point cloud, because the showPointCloudFunction does not support code generation.
Load the Parameters of the Stereo Camera
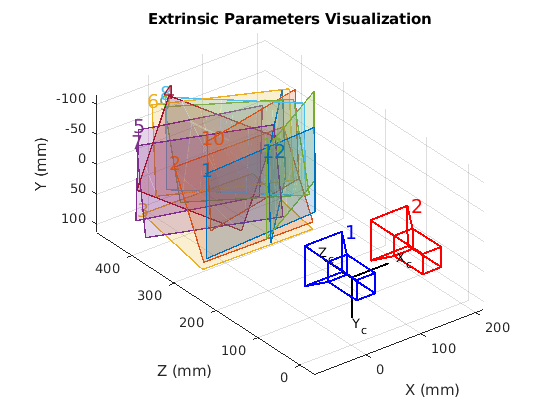
Load the stereoParameters object, which is the result of calibrating the camera using either the stereoCameraCalibrator app or the estimateCameraParameters function.
% Load the stereoParameters object. load('handshakeStereoParams.mat'); % Visualize camera extrinsics. showExtrinsics(stereoParams); % Convert the object into a struct, which can be passed into generated % code. stereoParamsStruct = toStruct(stereoParams);
Uncompress Video Files
On Macintosh, VideoReader does not support code generation for reading compressed video. Uncompress the video files, and store them in the temporary directory.
if strcmp(computer(), 'MACI64') || strcmp(computer(), 'MACA64') % Uncompress the left video. videoFileLeft = 'handshake_left.avi'; reader = VideoReader(videoFileLeft); writer = vision.VideoFileWriter(videoFileLeft); while hasFrame(reader) frame = readFrame(reader); step(writer, frame); end release(writer); % Uncompress the right video. videoFileRight = 'handshake_right.avi'; reader = VideoReader(videoFileRight); writer = vision.VideoFileWriter(videoFileRight); while hasFrame(reader) frame = readFrame(reader); step(writer, frame); end release(writer); end
Compile the MATLAB Function into a MEX File
Use the codegen function to compile the depthEstimationFromStereoVideo_kernel function into a MEX-file. You can specify the '-report' option to generate a compilation report that shows the original MATLAB code and the associated files that were created during C code generation. You may want to create a temporary directory where MATLAB Coder can store generated files. Note that the generated MEX-file has the same name as the original MATLAB file with _mex appended, unless you use the -o option to specify the name of the executable.
MATLAB Coder requires that you specify the properties of all the input parameters. One easy way to do this is to define the input properties by example at the command-line using the -args option. For more information see Specify Input Types at the Command Line (MATLAB Coder).
compileTimeInputs = {coder.typeof(stereoParamsStruct)};
% Generate code.
codegen depthEstimationFromStereoVideo_kernel -args compileTimeInputs;
Code generation successful.
Run the Generated Code
player = vision.VideoPlayer('Position', [100 200 750 560]); eofReached = false; while ~eofReached [eofReached, dispFrame] = depthEstimationFromStereoVideo_kernel_mex(stereoParamsStruct); % Hold the last frame. if ~eofReached step(player, dispFrame); end end

Clean Up
clear depthEstimationFromStereoVideo_kernel_mex;
release(player);
Summary
This example showed how to generate C code from MATLAB code that takes a cameraParameters or a stereoParameters object as input.