visionhdl.CornerDetector
Finds corners using FAST or Harris algorithm
Description
The visionhdl.CornerDetector
System object™ detects corners by using the features-from-accelerated-segment test (FAST)
algorithm or by the intersecting edges (Harris) algorithm. For each pixel, if the pixel is a
corner, the object returns the corner metric. If the pixel is not a corner, the object returns
a pixel value of zero.
The FAST algorithm tests a circular area around the potential center of the corner. The test detects a corner if a contiguous section of pixels are either brighter than the center plus a threshold or darker than the center minus a threshold. You can specify a minimum contrast threshold as a property or argument and select from three rules to define a corner. These rules specify how many pixels in a circle of pixels must exceed the minimum contrast for the center pixel to be considered a corner. The object performs parallel tests of all combinations of contiguous pixels around the circle. The FAST algorithm uses few hardware resources.
The Harris algorithm computes horizontal and vertical gradients, filters the gradient components with a circular 5-by-5 Gaussian filter, and computes a metric that represents the strength of the corner. You can specify a threshold that determines the level at which corners are detected. The object returns a corner for pixels where the metric exceeds this threshold. The Harris algorithm uses more hardware resources than the FAST algorithm, but can detect corners that the FAST algorithm might not find.
To detect corners in a pixel stream:
Create the
visionhdl.CornerDetectorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
corners = visionhdl.CornerDetector(
returns a corner detector System object. Set properties using one or more name-value arguments. PropertyName=Value)
For example:
corners = visionhdl.CornerDetector(Method='FAST 7 of 12',... MinContrastSource='Input port',... PaddingMethod='None')
Properties
Unless otherwise indicated, properties are nontunable, which means you cannot change their
values after calling the object. Objects lock when you call them, and the
release function unlocks them.
If a property is tunable, you can change its value at any time.
For more information on changing property values, see System Design in MATLAB Using System Objects.
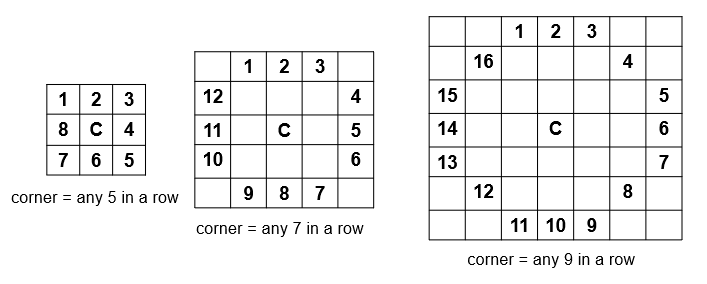
Select the Harris algorithm, or the size of the circle for the FAST algorithm. The
three FAST options specify how many contiguous pixels on the circle must exceed the
threshold for the center pixel to be marked as a corner. For the circles of 8, 12, and
16 pixels shown in these figures, the object detects a corner when 5, 7, or 9 contiguous
pixels,respectively, are above the threshold. The object checks for this number of
contiguous pixels anywhere on the circle. The object uses a kernel of size 3-by-3 for
'FAST 5 of 8', 5-by-5 for 'FAST 7 of 12', and
7-by-7 for 'FAST 9 of 16'.
Specify 'Property' to set the contrast threshold by using the
MinContrast property. Specify 'Input port' to
enable the thresh input argument.
Dependencies
To enable this property, set the Method property to one of
the FAST options.
Each pixel in the circle is subtracted from the center pixel value, and only those
differences that exceed this threshold are used to determine if the center pixel is a
corner and to calculate the output metric. This value is cast to the same data type as
pixelin.
Dependencies
To enable this property, set the Method property to one of
the FAST options and set the MinContrastSource property to
'Property'.
Specify 'Property' to set the threshold by using the
Threshold property. Specify 'Input port' to
enable the thresh input argument.
Dependencies
To enable this property, set the Method property to
'Harris'.
This value represents an approximation of the eigenvalues of the Harris matrix
calculated from the gradient results. The object returns a corner for pixels where the
metric exceeds this threshold. This value is cast to the same data type as the output
corner. The corner metric is in the range of a fourth power of
the input pixel values. For example, for an 8-bit input pixel, the full-precision output
size is 44 bits.
Dependencies
To enable this property, set the Method property to
'Harris' and set the ThresholdSource
property to 'Property'.
Size of the line memory buffer, specified as a positive integer. Choose a power of two that accommodates the number of active pixels in a horizontal line. If you specify a value that is not a power of two, the buffer uses the next largest power of two.
The object allocates (N –
1)-by-LineBufferSize memory locations to store the pixels.
N is the size of the kernel.
The object uses a kernel of size 3-by-3 when the Method
property is 'FAST 5 of 8', 5-by-5 when Method is
'FAST 7 of 12', and 7-by-7 when Method is
'FAST 9 of 16'.
When you set Method to 'Harris', the object
uses one 1-by-3 kernel and one 3-by-1 kernel for the gradient calculation and three
5-by-5 kernels for the circular window filter on the three gradient components.
Select one of these methods for padding the boundary of the input image. For more information about these methods, see Edge Padding.
'Symmetric'— Set the value of the padding pixels to mirror the edge of the image. This option prevents corners from being detected at the boundaries of the active frame.'Replicate'— Repeat the value of pixels at the edge of the image.'Reflection'— Set the value of the padding pixels to reflect around the pixel at the edge of the image.'None'— Exclude padding logic. The object does not set the pixels outside the image frame to any particular value. This option reduces the hardware resources that are used by the object and reduces the blanking that is required between frames. However, this option affects the accuracy of the output pixels at the edges of the frame. To maintain pixel stream timing, the output frame is the same size as the input frame. To avoid using pixels calculated from undefined padding values, mask off the n/2 pixels around the edge of the frame for downstream operations. n is the size of the operation kernel. For more details, see Increase Throughput by Omitting Padding.
The circular window filters used in the Harris algorithm pad the edges of the frame
using 'Replicate' padding.
Method to determine data type of output corner metric.
'Same as first input'' — Sets the data type of the corner metric to match the data type ofpixelin.'Custom'— Sets the data type of the corner metric to match the data type defined in theCustomOutputDataTypeproperty.'Full precision'' — Computes internal and output data types using full precision rules. These rules provide accurate fixed-point numerics and prevent quantization within the object. Bits are added, as needed, to prevent rounding and overflow.
Data type for the output corner metric, specified as
numerictype(S,WL,FL), where S is
1 (true) for signed and 0
(false) for unsigned, WL is the word length, and
FL is the fraction length in bits. The object cases the corner
metric to this data type.
Dependencies
This property applies when you set OutputDataType to
'Custom'.
Usage
Description
[
specifies the threshold that determines a corner as an input argument. This syntax applies
for both Harris and FAST algorithms. The threshold is interpreted differently for each
algorithm. To enable this argument when using the FAST algorithm, set the
corner,ctrlout] = corners(pixelin,thresh,ctrlin)MinContrastSource property to 'Input port'. To
enable this argument when using the Harris algorithm, set the
ThresholdSource property to 'Input port'.
This object uses a streaming pixel interface with a structure
for frame control signals. This interface enables the object to operate independently of image
size and format and to connect with other Vision HDL Toolbox™ objects. The object accepts and returns a scalar pixel value and control signals
as a structure containing five signals. The control signals indicate the validity of each pixel
and its location in the frame. To convert a pixel matrix into a pixel stream and control
signals, use the visionhdl.FrameToPixels object. For a
description of the interface, see Streaming Pixel Interface.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Algorithms
This object implements the algorithms described on the Corner Detector block reference page.