Fog Rectification
This example shows how to remove fog from images captured under foggy conditions. The algorithm is suitable for FPGAs.
Fog rectification is an important preprocessing step for applications in autonomous driving and object recognition. Images captured in foggy and hazy conditions have low visibility and poor contrast. These conditions can lead to poor performance of vision algorithms performed on foggy images. Fog rectification improves the quality of the input images to such algorithms.
This example shows a streaming fixed-point implementation of the fog rectification algorithm that is suitable for deployment to hardware.
To improve the foggy input image, the algorithm performs fog removal and then contrast enhancement. The diagram shows the steps of both these operations.
This example takes a foggy RGB image as input. To perform fog removal, the algorithm estimates the dark channel of the image, calculates the airlight map based on the dark channel, and refines the airlight map by using filters. The restoration stage creates a defogged image by subtracting the refined airlight map from the input image.
Then, the Contrast Enhancement stage assesses the range of intensity values in the image and uses contrast stretching to expand the range of values and make features stand out more clearly.

Fog Removal
There are four steps in performing fog removal.
1. Dark Channel Estimation: The pixels that represent the non-sky region of an image have low intensities in at least one color component. The channel formed by these low intensities is called the dark channel. In a normalized, fog-free image, the intensity of dark channel pixels is very low, nearly zero. In a foggy image, the intensity of dark channel pixels is high, because they are corrupted by fog. So, the fog removal algorithm uses the dark channel pixel intensities to estimate the amount of fog.
The algorithm estimates the dark channel  by finding the pixel-wise minimum across all three components of the input image
by finding the pixel-wise minimum across all three components of the input image  where
where ![$ c\ \epsilon\ [r,g,b] $](../../examples/visionhdl/win64/FogRectificationHDLExample_eq08379508612814727842.png) .
.
2. Airlight Map Calculation: The whiteness effect in an image is known as airlight. The algorithm calculates the airlight map from the dark channel estimate by multiplying by a haze factor,  , that represents the amount of haze to be removed. The value of is between 0 and 1. A higher value means more haze will be removed from the image.
, that represents the amount of haze to be removed. The value of is between 0 and 1. A higher value means more haze will be removed from the image.
![$$ I_{air}(x,y) = z \times \min_{c\ \epsilon\ [r,g,b]} I^c_{dark}(x,y)$$](../../examples/visionhdl/win64/FogRectificationHDLExample_eq08124392065725551305.png)
3. Airlight Map Refinement: The algorithm smoothes the airlight image from the previous stage by using a Bilateral Filter block. This smoothing strengthens the details of the image. The refined image is referred to as  .
.
4. Restoration: To reduce over-smoothing effects, this stage corrects the filtered image using these equations. The constant,  , represents the mid-line of changing the dark regions of the airlight map from dark to bright values. The example uses an empirically derived value of
, represents the mid-line of changing the dark regions of the airlight map from dark to bright values. The example uses an empirically derived value of  .
.

The algorithm then subtracts the airlight map from the input foggy image and multiplies by the factor  .
.

Contrast Enhancement
There are five steps in contrast enhancement.
1. RGB to Gray Conversion: This stage converts the defogged RGB image,  , from the fog removal algorithm into a grayscale image,
, from the fog removal algorithm into a grayscale image,  .
.
2. Histogram Calculation: This stage uses the Histogram block to count the number of pixels falling in each intensity level from 0 to 255.
3. Histogram Normalization: The algorithm normalizes the histogram values by dividing them by the input image size.
4. CDF Calculation: This stage computes the cumulative distribution function (CDF) of the normalized histogram bin values by adding them to the sum of the previous histogram bin values.
5. Contrast Stretching: Contrast stretching is an image enhancement technique that improves the contrast of an image by stretching the range of intensity values to fill the entire dynamic range. When dynamic range is increased, details in the image are more clearly visible.
5a. i1 and i2 calculation: This step compares the CDF values with two threshold levels. In this example, the thresholds are 0.05 and 0.95. This calculation determines which pixel intensity values align with the CDF thresholds. These values determine the intensity range for the stretching operation.
5b. T calculation: This step calculates the stretched pixel intensity values to meet the desired output intensity values,  and
and  .
.
 is 10% of maximum output intensity floor(10*255/100) for
is 10% of maximum output intensity floor(10*255/100) for uint8 input.
is 90% of maximum output intensity floor(90*255/100) for uint8 input.
T is a 256-element vector divided into segments  ,
,  , and
, and  . The segment elements are computed from the relationship between the input intensity range and the desired output intensity range.
. The segment elements are computed from the relationship between the input intensity range and the desired output intensity range.
![]()
 and
and  represent two pixel intensities in the input image's range and and represent two pixel intensities in the rectified output image's range.
represent two pixel intensities in the input image's range and and represent two pixel intensities in the rectified output image's range.
These equations show the how the elements in T are calculated.
![$$ t_1 = \frac{o_1}{i_1}[0:i_1] $$](../../examples/visionhdl/win64/FogRectificationHDLExample_eq16105232032876823092.png)
![$$ t_2 = (((\frac{o_2-o_1}{i_2-i_1})[(i_1+1):i_2]) - ((\frac{o_2-o_1}{i_2-i_1})i_1)) + o_1 $$](../../examples/visionhdl/win64/FogRectificationHDLExample_eq09207860601895300549.png)
![$$ t_3 = (((\frac{255-o_2}{255-i_2})[(i_2+1):255]) - ((\frac{255-o_2}{255-i_2})i_2)) + o_2 $$](../../examples/visionhdl/win64/FogRectificationHDLExample_eq16611732601334923537.png)
![$$ T = [t_{1} \quad t_{2} \quad t_{3}] $$](../../examples/visionhdl/win64/FogRectificationHDLExample_eq12147827072876778930.png)
5c. Replace intensity values: This step converts the pixel intensities of the defogged image to the stretched intensity values. Each pixel value in the defogged image is replaced with the corresponding intensity in T.
HDL Implementation
The example model implements the algorithm using a streaming pixel format and fixed-point blocks from Vision HDL Toolbox™. The serial interface mimics a real time system and is efficient for hardware designs because less memory is required to store pixel data for computation. The serial interface also allows the design to operate independently of image size and format and makes it more resilient to timing errors. Fixed-point data types use fewer resources and give better performance on FPGA. The necessary variables for the example are initialized in the InitFcn callback.
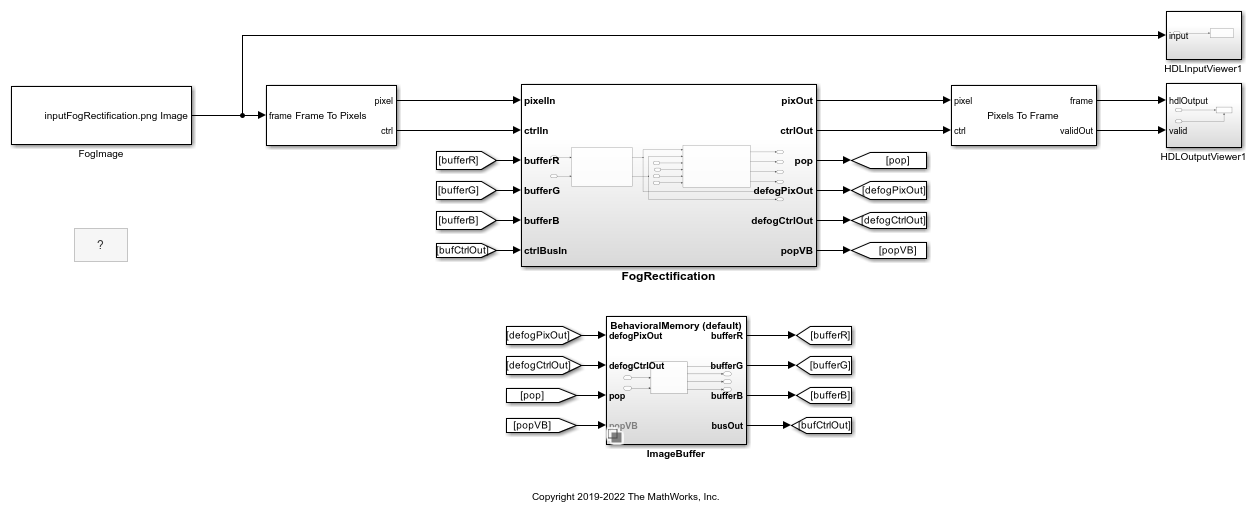
The FogImage block imports the input image to the model. The Frame To Pixels block converts the input frames to a pixel stream of uint8 values and a pixelcontrol bus. The Pixels To Frame block converts the pixel stream back to image frames. The hdlInputViewer subsystem and hdlOutputViewer subsystem show the foggy input image and the defogged enhanced output image, respectively. The ImageBuffer subsystem stores the defogged image so the Contrast Enhancement stages can read it as needed.
The FogRectification subsystem includes the fog removal and contrast enhancement algorithms, implemented with fixed-point datatypes.

In the FogRemoval subsystem, a Minimum block named DarkChannel calculates the dark channel intensity by finding the minimum across all three components. Then a Bilateral Filter block refines the dark channel results. The filter block has the spatial standard deviation set to 2 and the intensity standard deviation set to 0.5. These parameters are used to derive the filter coefficients. The bit width of the output from filter stage is the same as that of the input.
Next, the airlight image is calculated by multiplying the refined dark channel with a haze factor, 0.9. Multiplying by this factor after the bilateral filter avoids precision loss that would occur from truncating to the maximum 16-bit input size of the bilateral filter.
The Restoration subsystem removes the airlight from the image and then scales the image to prevent over-smoothing. The Pixel Stream Aligner block aligns the input pixel stream with the airlight image before subtraction. The scale factor,  , is found from the midpoint of the difference between the original image and the image with airlight removed. The Restoration subsystem returns a defogged image that has low contrast. So, contrast enhancement must be performed on this image to increase the visibility.
, is found from the midpoint of the difference between the original image and the image with airlight removed. The Restoration subsystem returns a defogged image that has low contrast. So, contrast enhancement must be performed on this image to increase the visibility.
The output from the FogRemoval subsystem is stored in the Image Buffer. The ContrastEnhancement subsystem asserts a pop signal to read the frame back from the buffer.
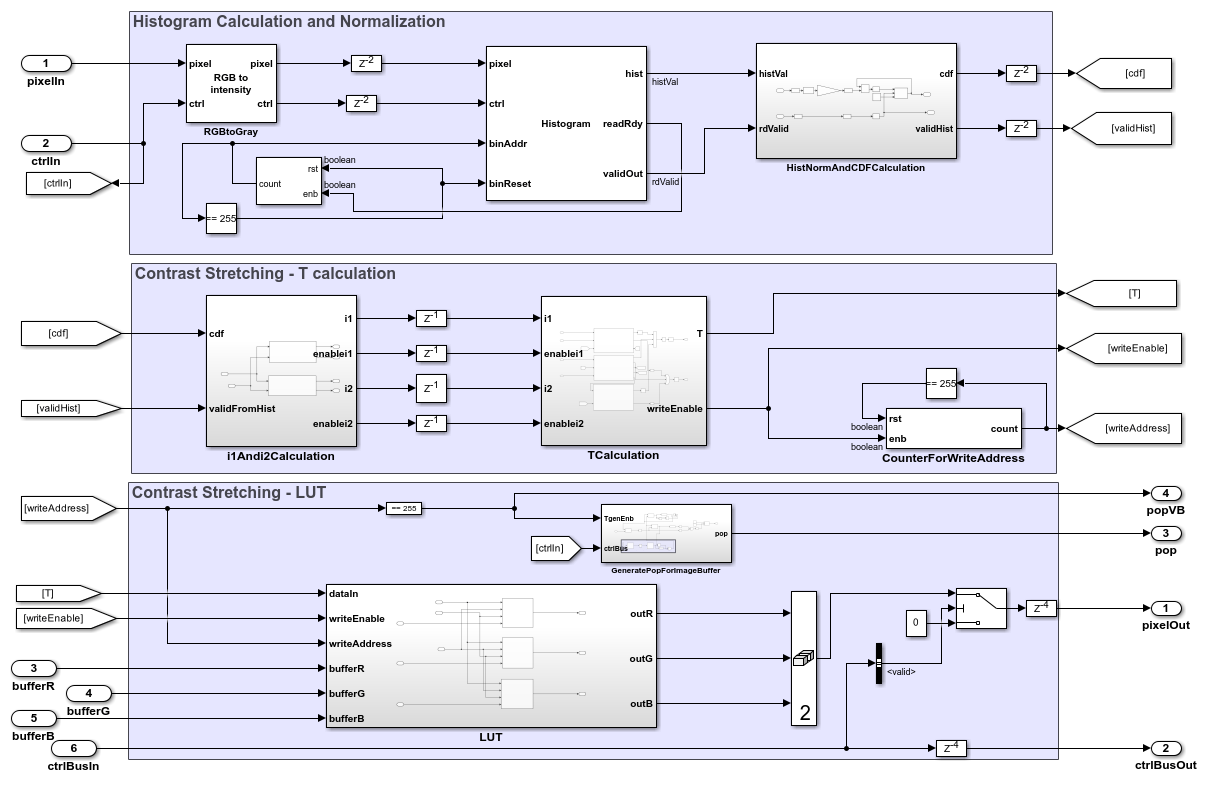
The ContrastEnhancement subsystem uses the Color Space Converter block to convert the RGB defogged image to a grayscale image. Then the Histogram block computes the histogram of pixel intensity values. When the histogram is complete, the block generates a readRdy signal. Then the HistNormAndCDFCalculation subsystem normalizes the histogram values and computes the CDF.
The i1Andi2Calculation subsystem computes the and values that describe the input intensity range. Then the TCalculation subsystem returns the list of target output intensity values. These 256 values are written into a lookup table. The logic in the Contrast Stretching-LUT area generates a pop signal to read the pixel intensities of the defogged image from the Image Buffer, and feeds these values as read addresses to the LUT. The LUT returns the corresponding stretched intensity values defined in T to replace the pixel values in the defogged image.
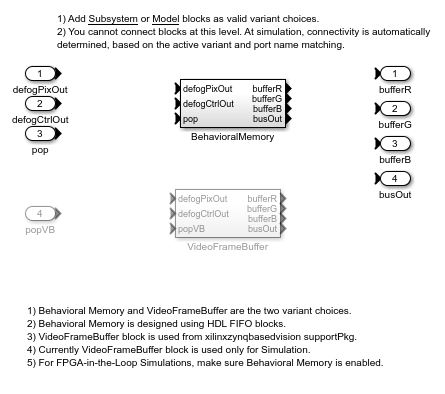
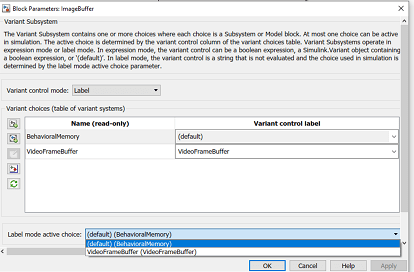
The Image Buffer subsystem contains two options for modeling the connection to external memory. It is a variant subsystem where you can select between the BehavioralMemory subsystem and the Video Frame Buffer block.
Use the BehavioralMemory subsystem if you do not have the support package mentioned below. This block contains HDL FIFO blocks. The BehavioralMemory returns the stored frame when it receives a pop request signal. The pop request to BehavioralMemory must be high for every row of the frame.
The Video Frame Buffer block requires the SoC Blockset™ Support Package for AMD® SoC Devices. With the proper reference design, the support package can map this block to an AXI-Stream VDMA buffer on the board. This frame buffer returns the stored frame when it receives the popVB request signal. The pop request to this block must be high only one cycle per frame.
The inputs to the Image Buffer subsystem are the pixel stream and control bus generated after fog removal. The pixel stream is fetched during the Contrast Enhancement operation, after the stretched intensities (T) are calculated.
Simulation and Results
This example uses an RGB 240-by-320 pixel input image. Both the input pixels and the enhanced output pixels use the uint8 data type. This design does not have multipixel support.
The figure shows the input and the enhanced output images obtained from the FogRectification subsystem.

You can generate HDL code for the FogRectification subsystem. An HDL Coder™ license is required to generate HDL code. This design was synthesized for the Intel® Arria® 10 GX (115S2F45I1SG) FPGA. The table shows the resource utilization. The HDL design achieves a clock rate of over 200 MHz.
% =============================================================== % |Model Name || FogRectificationHDL || % =============================================================== % |Input Image Resolution || 320 x 240 || % |ALM Utilization || 10994 || % |Total Registers || 20632 || % |Total RAM Blocks || 67 || % |Total DSP Blocks || 39 || % ===============================================================