在 Simulink 中为 CAN 实现分布式 ECU 网络
此示例说明如何使用 Vehicle Network Toolbox™ 和 Simulink® 为汽车上的 CAN 实现一个分布式电子控制单元 (ECU) 网络。
Vehicle Network Toolbox 提供了 Simulink 模块,用于通过 Simulink 模型在控制器局域网 (CAN) 上传输和接收实时报文。此示例使用 CAN Configuration、CAN Pack、CAN Transmit、CAN Receive 和 CAN Unpack 模块通过 CAN 总线执行数据传输。CAN 报文在 CAN 数据库文件 canConnectivityForVehicle.dbc 中定义。
此示例使用 MathWorks® 虚拟 CAN 通道。但您可以将模型连接到其他支持的硬件。
模型描述
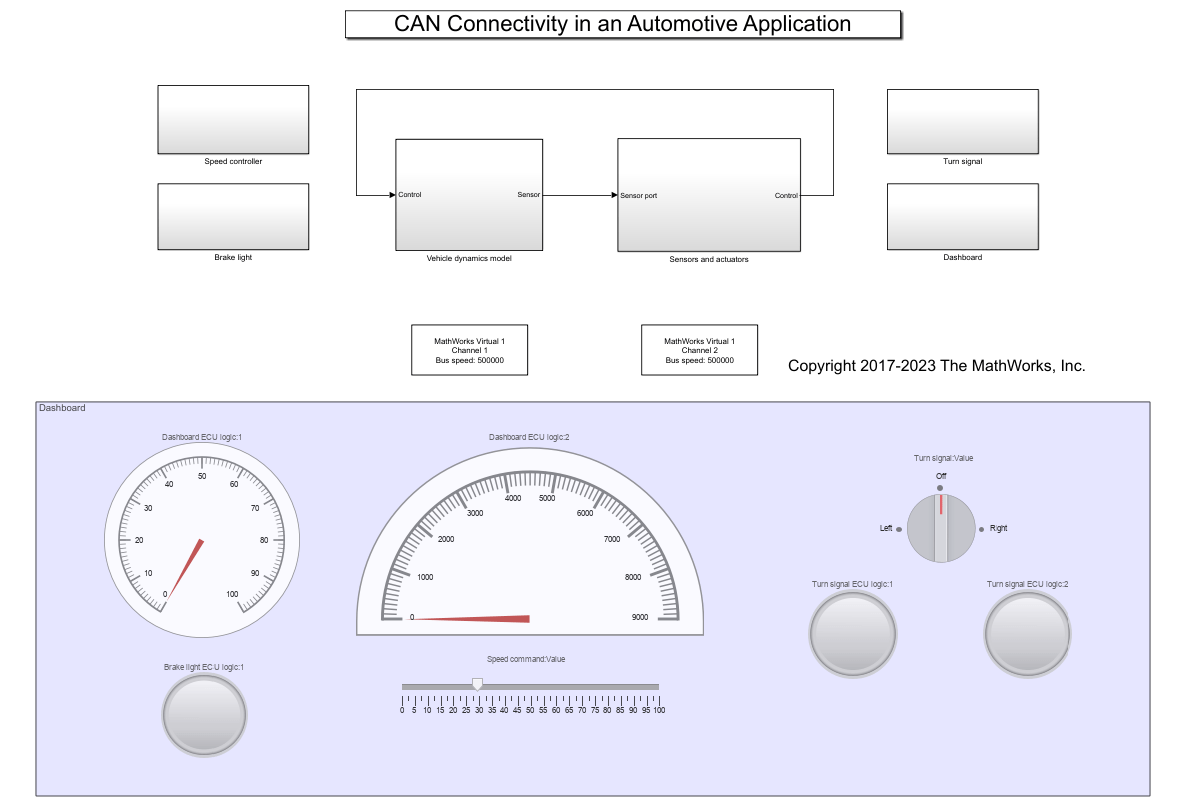
该模型由以下子系统组成:车辆动力学模型、传感器和作动器、转向信号、仪表板、刹车灯和速度控制器。车辆动力学模型代表汽车(环境),其他子系统代表 CAN 总线上的各种节点。
车辆动力学模型
该子系统定义汽车的运动方程。输入是节气门体和制动踏板两个作动器的位置。输出是发动机 RPM 和车速,它们经过多路复用处理为单个信号。
传感器和作动器
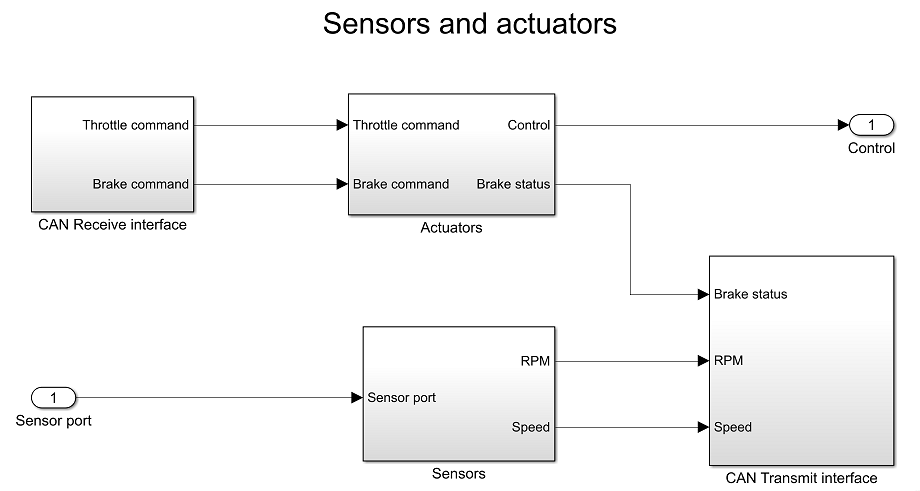
该子系统包含节气门体和制动作动器以及 RPM 和车速传感器。作动器通过 CAN 总线接收节气门和刹车命令。作动器输出(控制)馈送到车辆动力学模型。
制动作动器还发送一个信号,通知是否执行了刹车。该信号以 100 Hz 采样并传输到 CAN 总线。来自车辆动力学模型的发动机 RPM 和车速信号输入到该子系统,并且还以 100Hz 采样并传输到 CAN 总线。
仪表板
仪表板是车辆和驾驶员之间的接口。用户可以使用滑块设置所需的速度 (Speed command:Value)。可以使用旋转开关操作转向信号 (Turn signal:Value)。
速度命令和转向信号状态信号传输到 CAN 总线。从 CAN 总线读取采样的车速和发动机 RPM,并将其分别显示在车速表和转速表上。
速度控制器
速度控制器向作动器发送命令以将车速驱动到要求的值。从 CAN 总线读取车速和所需的速度。节气门和刹车命令由对应的离散比例积分控制器计算。作动器命令传输到 CAN 总线。
刹车灯
刹车灯子系统从 CAN 总线接收制动作动器状态信号并相应地操作刹车灯。只要刹车启动,刹车灯就会亮起。
转向信号
转向信号子系统从 CAN 总线接收转向信号状态报文并相应地激活转向信号。当旋转开关设置为“左侧位置”时,左转向信号灯周期性闪烁,当旋转开关设置为“右侧位置”时,右转向信号灯周期性闪烁。