记录和回放 CAN 报文
以下示例说明如何在 Simulink® 中使用 MathWorks® 虚拟 CAN 通道记录和回放 CAN 报文。您可以更新此模型以连接到您的系统上支持的硬件。
从示例文件夹中的 SourceMsgs.mat 文件加载保存的 CAN 报文。该文件包含 CAN 报文,这些报文表示绕试车道一周 90 秒的驾驶循环。
load SourceMsgs.mat或者,使用 blfread 函数从 BLF 文件中读取 CAN 报文。请注意,输出是标量元胞,因此需要从该元胞中提取时间表。
canMsgTimetable = blfread("SourceMsgs.blf");
canMsgTimetable = canMsgTimetable{1};通过 mdfRead 函数,可以使用类似的方法从 MDF 文件中读取。
请注意,所记录报文的初始时间戳不为零:
startTime = seconds(canMsgTimetable.Time(1))
startTime = 88.6176
stopTime = seconds(canMsgTimetable.Time(end))
stopTime = 177.2310
定义 0.01 秒的仿真时间步,并根据该时间步对 startTime 和 stopTime 的值进行舍入。
Ts = 0.01; startTime = round(startTime, 2); stopTime = round(stopTime, 2);
将报文转换为与 CAN Replay 模块兼容的格式,并将它们保存到一个单独的文件中。
canMsgs = canMessageReplayBlockStruct(canMsgTimetable); save DriveReplay.mat canMsgs whos
Name Size Bytes Class Attributes Ts 1x1 8 double canMsgTimetable 100000x8 35910921 timetable canMsgs 1x1 2400896 struct startTime 1x1 8 double stopTime 1x1 8 double
CAN Replay 模型
该模型包含:
一个 CAN Replay 模块,用于向
MathWorks Virtual Channel 1传输报文。一个 CAN Receive 模块,用于通过
MathWorks Virtual Channel 2接收 CAN 网络上的报文。
CAN Receive 模块配置为阻止所有扩展 ID,并且仅允许具有标准 ID 1200 的 WheelSpeed 报文通过。

配置与 CAN 报文时间序列一致的模型参数。点击建模选项卡,然后点击配置参数。在求解器窗格中,在对应的编辑字段中使用 startTime、stopTime 和 Ts 变量,如图所示。

点击确定以应用更改并关闭窗口。
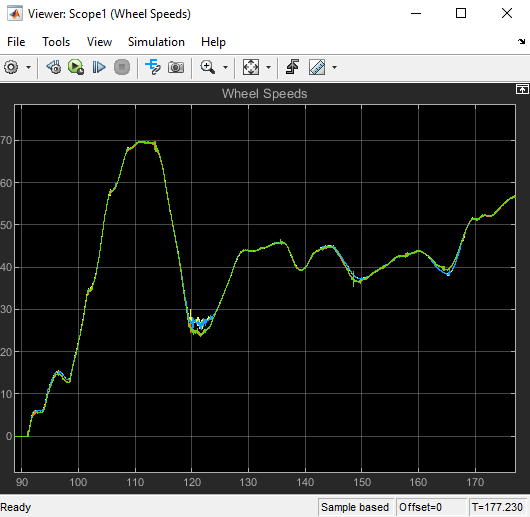
Wheel Speeds 子系统
Wheel Speeds 子系统对收到的 CAN 报文中的轮速信息解包,并将它们绘制到示波器中。该子系统还将报文记录到一个文件中。

可视化轮速信息
点击运行以运行仿真。根据您的计算机配置,示波器中显示的输出可能为零。
此结果与预期相符:模型仿真和报文传输在单独的线程中执行,因此它们并不同步。Simulink 会尝试尽可能快地执行仿真,但提供的时间序列很短;因此,在仿真完成之前,很可能第一条报文的传输尚未开始。
要回放记录的信号,更好的方法是使用仿真调速,因为这会减慢模型执行速度,以实现近实时的仿真。要激活仿真调速,请点击运行 -> 仿真调速,然后通过勾选框激活选项。再次运行仿真,然后在试驾期间可视化所有车轮的轮速。
加载包含所记录报文的文件
每次运行模型时,CAN Log 模块都会创建一个唯一文件。在 MATLAB® 命令行窗口中使用 dir 查找最新日志文件。
dir WheelSpeeds*.matWheelSpeeds_2023-Jun-20_150142.mat
load WheelSpeeds_2023-Jun-20_150142.mat
whosName Size Bytes Class Attributes Ts 1x1 8 double canMsgTimetable 100000x8 35910921 timetable canMsgs 1x1 2400896 struct outMsgs 1x1 240248 struct startTime 1x1 8 double stopTime 1x1 8 double
转换记录的报文
使用之前定义的 startTime 变量偏移记录的时间戳。
outMsgs.Timestamp = startTime + outMsgs.Timestamp;
使用 canMessageTimetable 将仿真期间记录的报文转换为可在命令行窗口中使用的时间表。
要直接访问报文信号,请在转换中使用对应的数据库文件以及 canSignalTimetable。
然后使用绘图函数可视化信号,并将它们与仿真输出进行比较。
db = canDatabase('VehicleInfo.dbc');
wheelSpeedMsgTimetable = canMessageTimetable(outMsgs, db);
wheelSpeedMsgTimetable(1:15, :)ans=15×8 timetable
Time ID Extended Name Data Length Signals Error Remote
__________ ____ ________ _______________ ___________________________ ______ ____________ _____ ______
88.912 sec 1200 false {'WheelSpeeds'} {[39 16 39 16 39 16 39 16]} 8 {1×1 struct} false false
88.92 sec 1200 false {'WheelSpeeds'} {[39 16 39 16 39 16 39 16]} 8 {1×1 struct} false false
88.929 sec 1200 false {'WheelSpeeds'} {[39 16 39 16 39 16 39 16]} 8 {1×1 struct} false false
88.939 sec 1200 false {'WheelSpeeds'} {[39 16 39 16 39 16 39 16]} 8 {1×1 struct} false false
88.947 sec 1200 false {'WheelSpeeds'} {[39 16 39 16 39 16 39 16]} 8 {1×1 struct} false false
88.957 sec 1200 false {'WheelSpeeds'} {[39 16 39 16 39 16 39 16]} 8 {1×1 struct} false false
88.965 sec 1200 false {'WheelSpeeds'} {[39 16 39 16 39 16 39 16]} 8 {1×1 struct} false false
88.974 sec 1200 false {'WheelSpeeds'} {[39 16 39 16 39 16 39 16]} 8 {1×1 struct} false false
88.982 sec 1200 false {'WheelSpeeds'} {[39 16 39 16 39 16 39 16]} 8 {1×1 struct} false false
88.99 sec 1200 false {'WheelSpeeds'} {[39 16 39 16 39 16 39 16]} 8 {1×1 struct} false false
88.999 sec 1200 false {'WheelSpeeds'} {[39 16 39 16 39 16 39 16]} 8 {1×1 struct} false false
89.007 sec 1200 false {'WheelSpeeds'} {[39 16 39 16 39 16 39 16]} 8 {1×1 struct} false false
89.016 sec 1200 false {'WheelSpeeds'} {[39 16 39 16 39 16 39 16]} 8 {1×1 struct} false false
89.024 sec 1200 false {'WheelSpeeds'} {[39 16 39 16 39 16 39 16]} 8 {1×1 struct} false false
89.033 sec 1200 false {'WheelSpeeds'} {[39 16 39 16 39 16 39 16]} 8 {1×1 struct} false false
wheelSpeedSignals = canSignalTimetable(wheelSpeedMsgTimetable); wheelSpeedSignals(end-14:end, :)
ans=15×4 timetable
Time LR_WSpeed RR_WSpeed RF_WSpeed LF_WSpeed
__________ _________ _________ _________ _________
177.38 sec 56.73 56.73 56.61 56.65
177.39 sec 56.76 56.69 56.64 56.66
177.4 sec 56.74 56.66 56.62 56.65
177.41 sec 56.72 56.73 56.56 56.64
177.42 sec 56.76 56.76 56.57 56.66
177.43 sec 56.78 56.69 56.66 56.72
177.44 sec 56.82 56.74 56.72 56.74
177.45 sec 56.85 56.81 56.77 56.72
177.45 sec 56.79 56.81 56.79 56.69
177.46 sec 56.76 56.83 56.78 56.66
177.47 sec 56.74 56.79 56.74 56.66
177.48 sec 56.7 56.74 56.68 56.69
177.49 sec 56.76 56.77 56.69 56.72
177.5 sec 56.76 56.81 56.72 56.77
177.51 sec 56.65 56.83 56.68 56.77
plot(wheelSpeedSignals.Time, wheelSpeedSignals{:,:});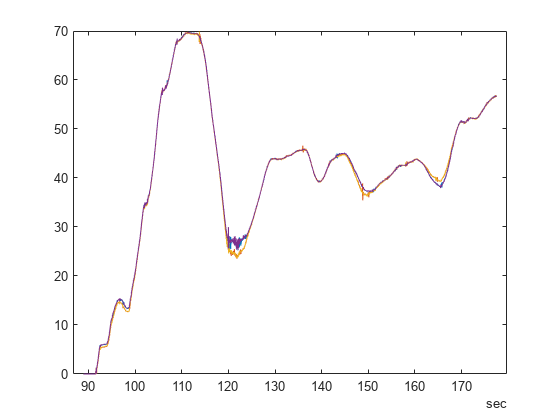
此示例中使用了 MathWorks CAN 虚拟通道。但是,您可以将模型连接到其他支持的硬件。
另请参阅
工具
- 仿真调速选项 (Simulink)
主题
- 解码并将 CAN 数据写入 MDF 文件
- 硬件接口模型中的计时
- 选择求解器 (Simulink)