Hi All;
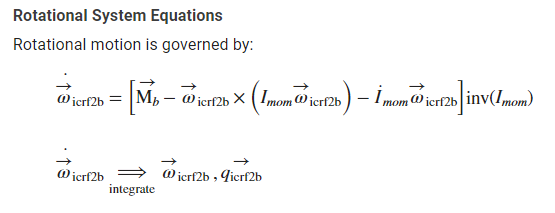
The governing rotational system dynamic equatons page (link here) gives the following equation. If you play around with the actual block, you will see that the moment of inertia matrix in this equation is given with respect to body fixed axis. The equation above however is written in inertial (i.e. ICRF) frame. So for example if you want to input the initial w_icrf2b, I believe the components are accepted in ICRF coordinate system. If this is the case, during the implementation of above equation, either we need to convert Mb and w_icrf2b vectors to body coordinate (like for example quatrotate(q_icrf2b, w_icrf2b)) and then implement the equation; OR first transform the inertia matrix to inertial frame (first find the transformation matrix between ICRF and body using q_icrf2b then I_icrf = R' * I_body * R where R is the transformation matrix) then implement the above equation by replacing I_mom = I_icrf.
If the above equation is implemented in the block by assuming that Mb and w_icrf2b are defined in inertial but already expressed in body frame, (which is the only explanation I have right now) then my discussion is no longer valid.
Is there anyone who can speculate about this topic ?
Many thanks