Ask Me Anything about image analysis or the Mathworks community
108 个评论
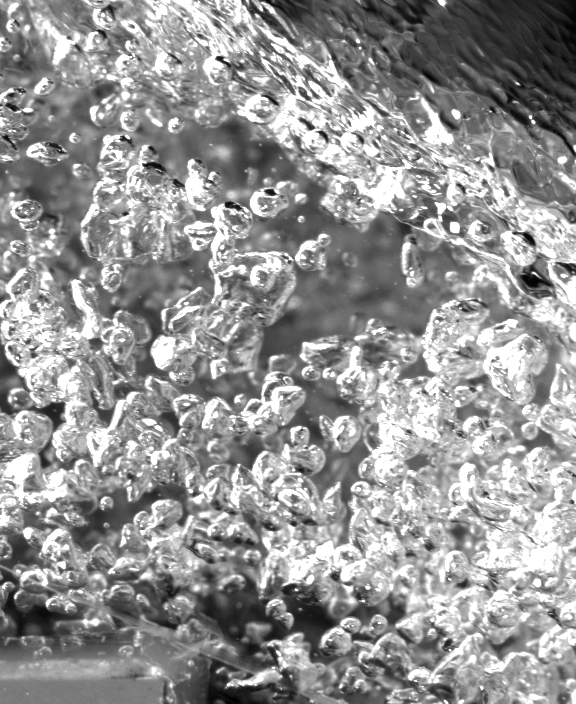
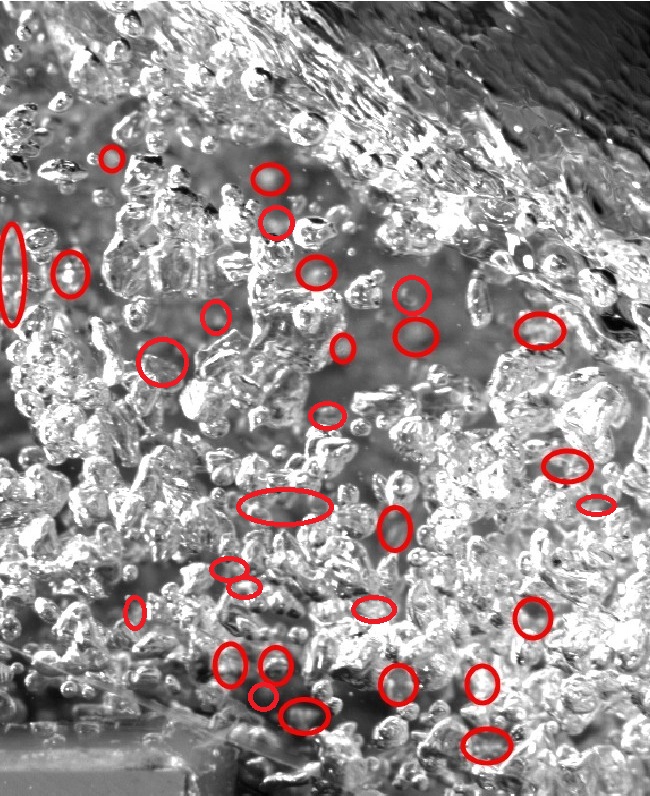
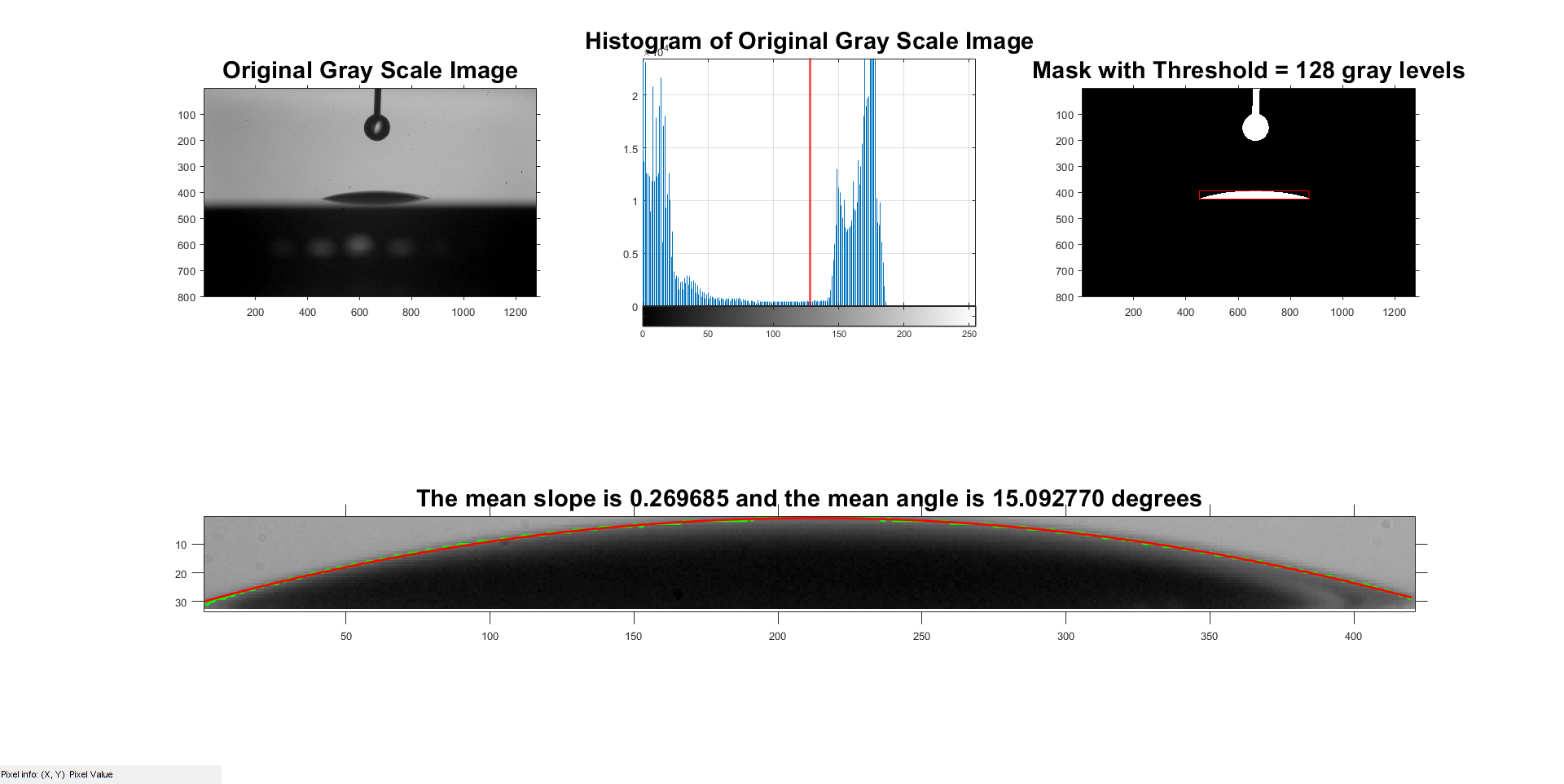
- first binarize the image with adapthresh with factor 1, then use this binarize image as a mask, then use regionfill to replace this white spots, then use a suitable pixel value to replace the background pixel with 0. It did not worked , as majority of infocus bubble surface are with the pixel value 255, in the gray image ,means it is getting detected by binarization factor 1.
- first choose the a suitable pixel value as threshold , replace the background with pixel value 0, then for blurred white spots in background use bwareaopen and a suitable area threshold to remove. but this does not work as the sizes of the spots are different.
- to choose those particular portion and replace those values will not work as I have a set of images , and this type of white spots are appearing in each and every case.
- I also tried to fix it with lights but , every time they appear in those image
Hi, this is Muhammad. I want to linearize a system. But before that I just wanted to check the block linearization. I tried so much to linearize x^2 or sqrt(x) but unable to find good approximation using simulink linear model app. Can you please help?

Hello dear teacher, my name is Chris, I studied and recently qualified as a higher-level technician in industrial automation and control. I know that MATLAB is a widely used tool to carry out industrial automation and control processes. It is used to develop control algorithms, simulate control systems, design artificial intelligence algorithms for predictive maintenance, operations optimization, and generate real-time code for PLCs and industrial controllers. My question is, what do I have to learn so that the software can help me create matrices and vectors and be able to learn to use them in the field at an industrial level? I am also interested in learning Autodesk investor professional.
Thank you very much for your attention and information.
Greetings from a distance.
Muchas gracias por su orientación y apoyo.
Saludos.
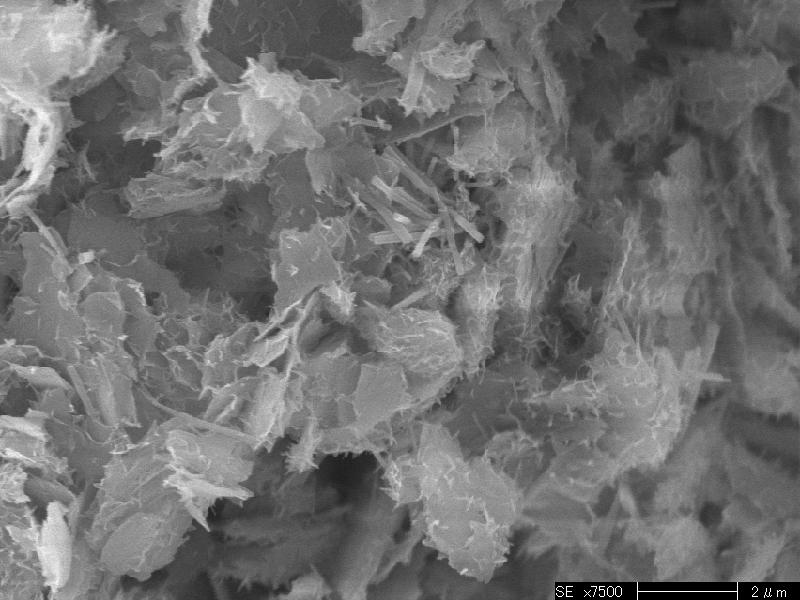
- Needle-like Shape (Ettringite, Ett): Identified by its needle-like, elongated crystal structure.
- Plate-like Crystalline Structure (Calcium Hydroxide, CH): Appears as plate-like shapes with more defined, flat surfaces.
- Fibrous Formation (Calcium Silicate Hydrate, CSH): Appears as fibrous or gel-like structures under a scanning electron microscope (SEM). These fibers can be loosely packed or densely interwoven, creating a complex network.
标签
您也可以从以下列表中选择网站:
美洲
- América Latina (Español)
- Canada (English)
- United States (English)
欧洲
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom(English)
亚太
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)