搜索
- Pink_panther, entry: Let's Go Fruity: Strawberry, category: File Exchange
- Lateef Adewale Kareem, entry: Umbrella, category: File Exchange (nice use of your own File Exchange entry)
- Teodo, entry: Shock wave, category: creative
- Basil Imoberdorf, entry: Colorful Fibonacci Scatter Spiral, category: colorful
- Stefan Abendroth, entry: Seahorse, category: abstract
- Paul Villain, entry: 102 mod 500, category: intricate
- The top 3 players for solving most problems in week 1 are Mohammed, Stefan Abendroth, and Hans Bourgeois. Congratulations! Each of you won an Amazon gift card.
- You don’t need to be an expert or spend tons of time to win! As long as you participate, you have the opportunity to win MathWorks T-shirts. Week 1 lucky winners are Meredith Reid and KARUPPASAMYPANDIYAN M.
- Voting started. Cast your votes on your favorite images. Help us show the world the beauty of mathematics by sharing your work with your friends, classmates, or colleagues.
- Toolboxes unlocked. You are able to leverage the Image Processing Toolbox to generate even more interesting images. We will award the best entries leveraging the Image Processing Toolbox.
- Week 2 special problem group published. Check out MATLAB Fundamentals - Plotting and Visualization. Will you be able to finish the group in week 2?

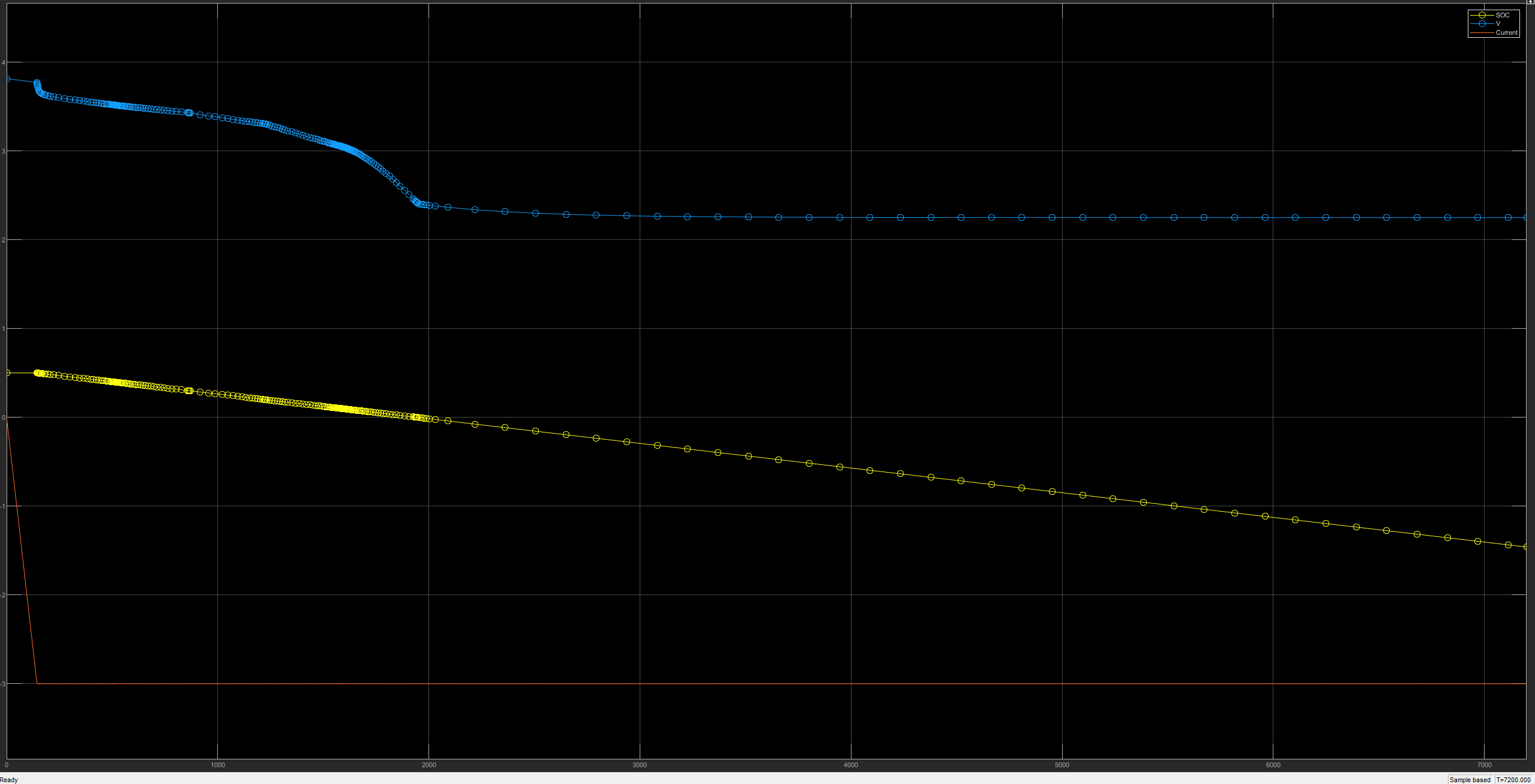
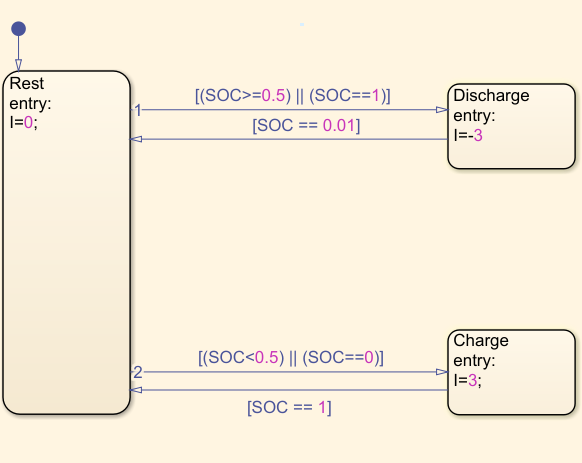
- If the battery has SOC >= 50%, it has to discharge. If the battery has SOC < 50%, it has to charge.
- While discharging, if the battery reaches 0% SOC, it goes to rest.
- While charging, if the battery reaches 100% SOC, it goes to rest.

hello can some body help me regarding designing a project in simulink to estimate the state of health of a battery ?... including kalman filter .... at least i need the battery cell equivalent circuit in simulink and the idea of the estimation method
many thanks

I have a datasheet of an induction motor (as figure below). I want to simulate it on matlab/simulink, but I don't know it's parameters (Lls, Llr, Lm, Rr, Rs).
I tried to search about open circuit test and blocked rotor test to determine these parameters, but some of information doesn't appear on datasheet and I don't have the real motor to test on it (datasheet is only think I have).
Could someone help me with this?
Assignments, quizzes, midterms, finals, grades, joys of success, the anxiety of low grades. Sounds like a typical cycle that students go through, right? Sometimes, all that hustle and bustle makes students forget that coding could be fun! Dr. Amin Rahman teaches AMATH 301 at the University of Washington. Many engineering students take this course and learn MATLAB in the course. He was looking for ways to keep students engaged and remind them that coding is fun. To achieve this goal Dr. Rahman and I set up a small competition in MATLAB Grader. Dr. Rahman selected several problems from MATLAB Grader problem collections. Students competed in this optional competition without the pressure of grades. They submitted their solutions; their submissions were automatically graded using MATLAB Grader and they got instant feedback. Green checkmarks for the correct answers empowered students and gamified coding. With the feedback they got, they continuously improved their code.
Prizes? Aside from the joys of coding in MATLAB, students won MathWorks-branded items like t-shirts, hats, and bags and proudly wore them as you can see in Dr. Rahman’s tweet.
Interested in using MATLAB Grader? Interested in accessing MATLAB Grader problem collections? Like to brainstorm ideas to make coding more fun? Reach out to us! We are here to help. Any creative ideas to make courses more engaging? Please share your ideas with this community!
If you are interested in live script lecture notes in the following areas, take a look at the short course ( Advanced MATLAB for Scientific Computing ) developed at Stanford. You can also download the required data for the examples from the course GitHub page.
- MATLAB Fundamentals
- Graphics and Data Visualization
- Efficient Code Writing
- System and File Manipulation
- Big Data Handling
- Numerical Linear Algebra
- Numerical Optimization
- Symbolic Toolbox, ODE, and PDE
- Statistical and Machine Learning
- Deep Learning
- Object-Oriented Programming
- Using MATLAB with Other Programming Languages
- Image Processing, Computer Vision, and Image Acquisition
- Signal Processing, Audio, and DSP System
您也可以从以下列表中选择网站:
美洲
- América Latina (Español)
- Canada (English)
- United States (English)
欧洲
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom(English)
亚太
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)