搜索
WiDS Datathon 2021 is going on right now. The focus of the Datathon this year is "on creating models to classify whether patients have been diagnosed with a certain type of diabetes." You can register and participate until March 1.
Also, take a look at this blog post on the MATLAB benchmark code for this datathon.
MATLAB Benchmark Code for WiDS Datathon 2021
There are also various online challenges by MathWorks that students may be interested. Here are the winners from last year's Simulink Student Challenge. There was also a MATLAB Online Live Editor Challenge a couple of years ago.
Hello , I wonder how to determine continous or discrete time modelling.For example if I want to run my model in MCU in this case discrete model is suitable?I am a bit confused
Here's an example of virtualizing a lab course.
MathWorks is please to offer a new training course, Power Electronics Control Design with Simulink and Simscape.
This one-day course focuses on modeling and controlling power electronic systems in the Simulink® environment using Simscape Electrical™. Topics include:
- Modeling direct current (dc) power electronic components
- Controlling the level of fidelity in a model
- Developing controls for power electronics
- Modeling three-phase alternating current (ac) power electronic components
- Controlling power electronics for motor drive applications
Hi everyone,
I am a third year BEng Energy Engineering student. I am looking at the design, modelling and peformance of an HVDC power converter for use in offshore wind for my final year dissertation. Power electronics is a new area for me and I am also new to simulink/ simscape elctrical.
Could anyone provide some useful examples of MMC (in particular rectifiers), or some advice for designing in simscape electrical. I am struggling with the design of PWM control especially. I aim to make a scaled down version of the MMC in Simulink but so far have had no luck. If anyone can help I would be really appreciative.
Thanks in advance.
Joe
Hi everybody!I've realized a DC/DC Buck Converter Model with closed loop control system. I need to limit the overshoot in the step response of the submitted system. I've already tried to tune the controller in the PID Tuner by manually adjusting the overshoot by moving the response time slider, as it is said in this article: https://it.mathworks.com/help/slcontrol/gs/automated-tuning-of-simulink-pid-controller-block.html The problem is that it is not accurate. I manage to get an overshoot of 4.77% or 5.4%, whereas i need to set the parameters in order that the overshoot is 5%. Should I use TuningGoal.Overshoot? How am I supposed to do? How should I set the input and output in my model? I've read Matlab documentation but I didn't catch that. Thanks in advance!
I am currently working on simulink online but I cannot maximize the screen
Just making sure people are aware of our new Onramp courses. These are great self-learning resources for students.
Released a few months ago:
Released this month:
Please I would be glad if I could be helped with the design of Microturbine coupled with PMSG.
How do you teach subjects like Programming and Numerical Computing hands-on in these challenging times?
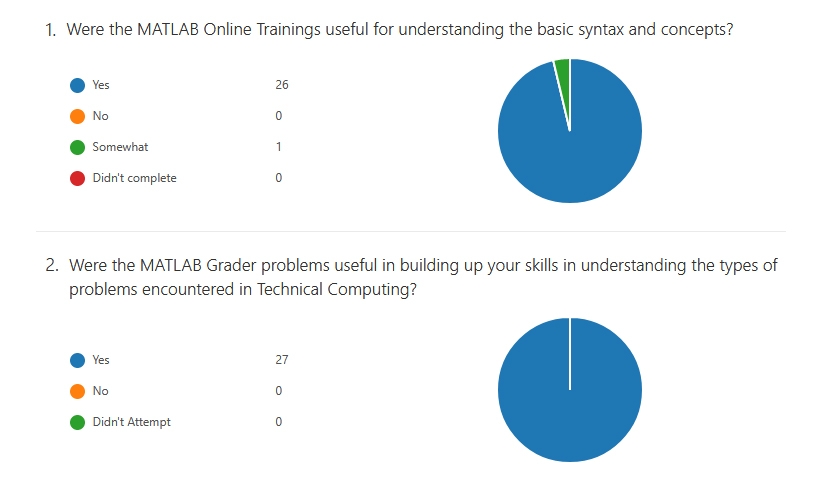
Prof Chiranjoy Chattopadhyay at the Dept of Computer Science and Engineering at IIT Jodhpur shares his innovative approach to teaching at a distance in this new Technical Article on Teaching Parallel Computing Online with MATLAB.
The course utilized MATLAB Online , MATLAB Onramp and MATLAB Grader to train students in the basics of technical computing, in addition to using a Hands-on Online GPU workshop organised with the MathWorks Education Team. As a result of this approach to distance teaching, the students have reported good levels of understanding in the main learning outcomes of this course, as indicated in the survey results (below):
Please consider trying out the links above to check if your course might benefit from a similar approach, and feel free to message us if you are interested in learning more.
I just highlighted an app on File Exchange for emulating an experiment. Great idea for doing lab classes with software. What I like about this app is that it incorporates statistical variance and measurement noise that comes from physical experiments.
Read more about it here:
https://blogs.mathworks.com/pick/2020/11/20/emulating-a-physical-experiment-of-measuring-mms/
Hi everyone, I'm trying to estimate the Frequency Response of a buck converter. I've found this article: https://it.mathworks.com/company/newsletters/articles/estimating-the-frequency-response-of-a-power-electronics-model.html I've adapted the procedure to a buck converter and followed the instructions but something went wrong. In the last step I've performed a time-domain verification in a Simulink® simulation with the switch-mode buck converter and a Transfer Function block implementing the parametric estimation and compare the response of both systems to the same small perturbation signal but the estimated model response doesn't match the switching model response. I don't know why I've got a diverging systems. I've tried to reduce the load and modify the duty cycle but nothing changed. How can I fix it?

In the link below (File Exchange), you'll find an example with an electric motor supplied by a fuel cell stack (Simscape implementation) and a battery. When motor load is low-to-normal, the fuel cell provides excess energy, that is used to recharge the battery. At motor peak load, the battery needs to contribute in order to complete the expected duty. If you have any query or thoughts, please reach me at jsagardu@mathworks.com
https://www.mathworks.com/matlabcentral/fileexchange/59343-fuel-cell-battery-driven-electric-motor-h2-transfer
I would like to plot 2 discrete vectors on one graph created as follows: u=1; X={u,2*u,3*u,4*u,5*u,6*u,7*u,8*u,9*u}; Y={u,3*u,5*u,-u,-6*u,u-u,u^2,u^3,u^4}; stem(X,Y) unfortunately system returns error how to do it properly?
Here's a short article describing how educators from UNSW have used Live Scripts to help students understand mathematical models. Interactive live scripts allow students to experiment and understand concepts through trial and error. The article also explains how the scripts helped provide an enriched online learning experience for the students.
Do you use Live Scripts in your teaching?
Hi All,
Using the PMLSM SimScape block for my FOC PMLSM model - PMLSM
In the example ee_pmlsm_drive.slx which i have based my FOC architedure on, have a few questions please.
There is a gain block after the outer loop velocity controller (iq_Ref), which is the inverse of the Force constant (Kt) shown as (2/3*Np*PM) in the literature. This is also used in the PMSM FOC model, placed after the torque limiter Tq to iq_Ref. Why is this inverse Kt gain added to the idq_ref signal? Does this cancel Kt if its used in the Force Equation?

Previous help posts regarding the Force Constant (Kt), imply emitting the constant (3/2) in Kt. Also in the PMLSM help center document states Ke, Kt and Flux linkage are equal. Does this simplification apply to the translational machine counterpart SimScape block?

I have tried to look into the SimScape block code of the PMLSM to confirm, how do i look under the mask to check the Force equation for the PMLSM to confirm Kt and Ke used in this model?
Any help would be great as this is holding up Validation of my "small signal" linear PMLSM model against the SimScape PMLSM block model.
Thanks
Patrick
I'm a student. Please send me a simulation of a residential microgrid. I need this simulation for my university thesis. My thesis is about economically efficient operation of a residential microgrid using the mopso algorithm.
I often code snippets to students in the question description. I would like the students to be able to copy and paste these from the description into their solution, obviously all on the same web page. I thought this was the case before, but now Ctrl+C/V do not work and when I right click there is no copy/paste options. Is this not possible?
您也可以从以下列表中选择网站:
美洲
- América Latina (Español)
- Canada (English)
- United States (English)
欧洲
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom(English)
亚太
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)