搜索
So, I'm trying to find the rate of climb against the velocity.
Both of these variables are 1 x 100 vectors.
rate of climb = v.*(T-D)./w
where w is a constant. t,d and v are all arrays of 1 x 100 row vectors. I was wondering ways to find the derivative at the local maximum. Examples would be appreciated.

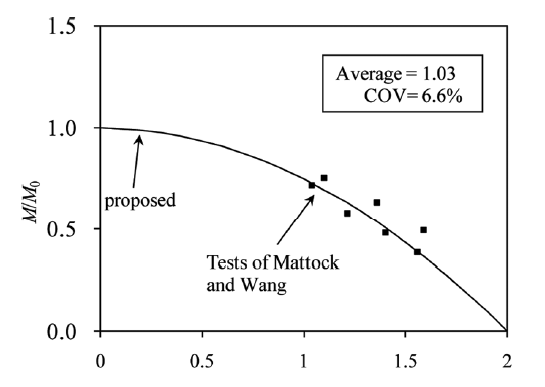 Hi, I have this equation for moment-axial force interaction: 0.25*(M/M0)^2 + (N/N0) = 1. This equation produces the following curve. Now, I need to make a change to this equation so that the first term becomes (M/M0)^2, and the second term can be changed while keeping (N/N0). The other side of the equation remains the same. ((M/M0)^2+?? = 1). I need to get the same curve as in the figure.
Hi, I have this equation for moment-axial force interaction: 0.25*(M/M0)^2 + (N/N0) = 1. This equation produces the following curve. Now, I need to make a change to this equation so that the first term becomes (M/M0)^2, and the second term can be changed while keeping (N/N0). The other side of the equation remains the same. ((M/M0)^2+?? = 1). I need to get the same curve as in the figure.
How to Simulate a Synchronous Compensator in Simulink?
- Tim
- Zhaoxu Liu / slandarer
- KARUPPASAMYPANDIYAN M
- Dhimas Mahardika S.Si., M.Mat
- Augusto Mazzei
- Jenny Bosten
- Lucas
- Jr
- Victoria
- ME
Hello there, I have a Amesim Black box model in Simulink. On my desktop, it works well. Also i tried to run on other desktops. Most of them work well. But some of them gives following error: Error in 'Model' while executing C MEX S-function 'Model', (mdlInitializeConditions), at time 0.0. Caused by: in Simcenter Amesim mexfunction: 'Model', Simcenter Amesim fatal error Cannot initialize Simcenter Amesim Model. EXIT This is an urgent case for me. Could you please help me?
Thank you so much.