
Point cloud tools for Matlab
Various tools for working with large point clouds
Point cloud tools for Matlab
Note: If you just want to align 2 point clouds with the ICP algorithm, check out a newer and simpler solution called simpleICP (also available at the Matlab File Exchange). However, if you want to work with point clouds and visualize them, or you need a more flexible and powerful ICP algorithm to align > 2 point clouds at once, this here might be the right solution for you.
Documentation
The documentation is hosted here: https://www.geo.tuwien.ac.at/pg/pctools/pctools.html
Currently included are:
-
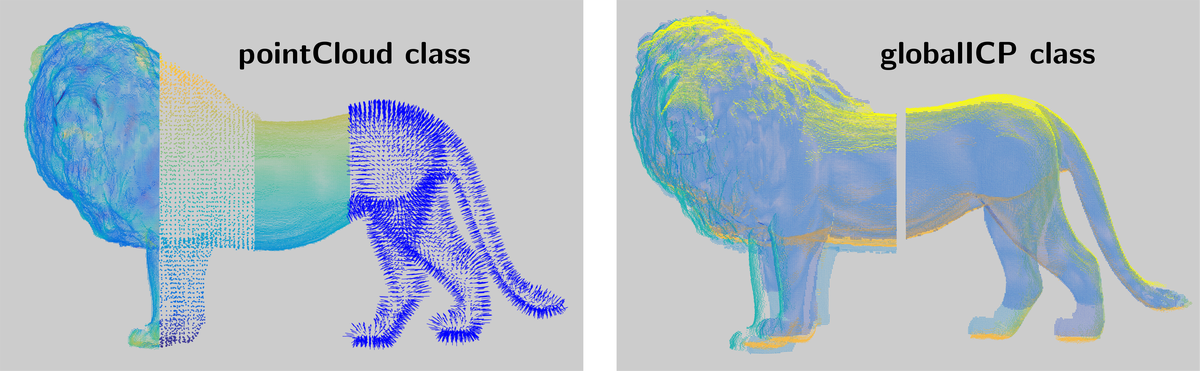
pointCloud class: a Matlab class to read, manipulate and write point clouds
-
globalICP class: a Matlab class to optimize the alignment of many point clouds with the ICP algorithm
Also available on:

Please cite related papers if you use this code:
@article{glira2015a,
title={A Correspondence Framework for ALS Strip Adjustments based on Variants of the ICP Algorithm},
author={Glira, Philipp and Pfeifer, Norbert and Briese, Christian and Ressl, Camillo},
journal={Photogrammetrie-Fernerkundung-Geoinformation},
volume={2015},
number={4},
pages={275--289},
year={2015},
publisher={E. Schweizerbart'sche Verlagsbuchhandlung}
}
Star History
引用格式
Glira, Philipp, et al. “A Correspondence Framework for ALS Strip Adjustments Based on Variants of the ICP Algorithm.” Photogrammetrie - Fernerkundung - Geoinformation, vol. 2015, no. 4, Schweizerbart, Aug. 2015, pp. 275–89, doi:10.1127/pfg/2015/0270.

无法下载基于 GitHub 默认分支的版本
| 版本 | 已发布 | 发行说明 | Action |
|---|---|---|---|
| 2.0.0.3 | Updated link to docs |
||
| 2.0.0.2 | Change project image |
||
| 2.0.0.1 | Add link to simpleICP |
||
| 2.0.0.0 | Major update for pointCloud and globalICP class. |
||
| 1.0.0.0 | Description updated
Image updated
|