Control Design | Virtual Commissioning of Production Machines, Part 3
From the series: Virtual Commissioning of Production Machines
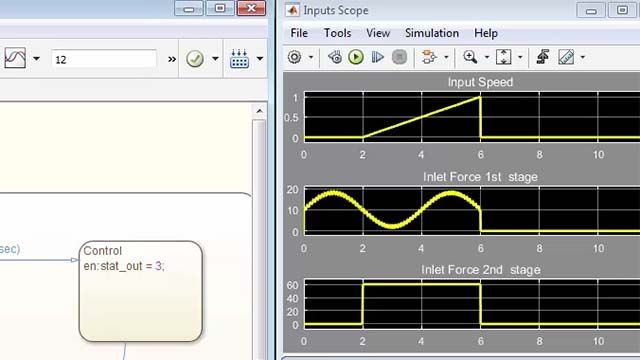
Once web system dynamics have been modeled, you can tune the gains of the PID controller in the drive control system. Use a PID tuner to linearize a nonlinear Simulink® model and to automatically calculate proportional, integral, and derivative gains. You can use the PID tuner to fine tune the design by changing how fast and aggressive the controller should be. Finally, you can verify the design by updating the PID controller block with tuned gains and simulating the controller with a plant model in a closed-loop simulation.
Published: 29 Nov 2016