什么是蓝牙 6?
蓝牙® 6 是蓝牙的最新重大修订版本,它使电子设备能够在短距离内以无线方式交换数据。蓝牙 6 于 2024 年 9 月由蓝牙技术联盟 (SIG) 发布。蓝牙 6 的一些显著特征包括:
- 信道探测,用于精确距离测度
- 基于决策的广告过滤,用于实现更高效的信道扫描
- 监控广告源,用于在设备进入和离开范围时提高能效
- 帧间间隔更新,用于兼顾更高吞吐量和更好的共存管理
据 SIG 称,蓝牙信道探测能够实现更精确的距离感知、10 厘米的测距准确性以及增强的安全性。
使用蓝牙信道探测进行测距
在蓝牙 6 之前,设备之间距离的推断是通过测量接收信号强度指示器 (RSSI) 来实现的,其前提是信号链路上存在自由空间路径损耗。但如果信号因多径效应或遮蔽效应遭受更多损失,则距离会被高估。
蓝牙 6 引入了两种精确测量距离的方法:
- 往返时间 (RTT) 测量
- 基于相位的测距 (PBR) 测量
RTT
蓝牙 6 中的 RTT 测量方法基于这样一个事实:两个设备之间的信号飞行时间 (TOF) 是 RTT 的一半。据此它可以精确地计算距离 d,公式为:
\(d=(\tfrac{RTT}{2})*c\)
其中 c 是光速。此方法需要精确测量设备 1(发起方)的出站信号的离开时间 (TOD)、出站信号到达设备 2(反射方)的到达时间 (TOA)、设备 2 返回信号的离开时间 (TOD) 以及返回信号到达设备 1 的到达时间 (TOA)。下图显示了各个信号路径和时间。时间 tI 是发起方的 RTT,时间 tR 是从反射方接收到信号到其随后传输的时间。

使用发起方和反射方之间的往返飞行时间测量距离。
PBR
蓝牙 6 中的 PBR 方法使用两个不同频率的信号来测量距离。这些信号只是音调 - 正弦波。距离可以作为两个接收音调之间的相位差的函数来计算。由于一个给定的相位差值可以对应无限多个距离值,支持蓝牙 6 的设备会选择满足相位差条件的最短距离。PBR 的预期范围约为 150 米。此外,如果有三个或更多蓝牙 6 定位器节点参与 RTT 或 PBR 测距,它们可以使用三边测量法来查找被跟踪设备的位置。
蓝牙 6 概述了 RTT 和 PBR 距离测度方法,但信道探测并不强制规定计算距离估计值的具体算法。种灵活性允许设备制造商根据不同的用例来定制解决方案,从而在计算复杂性与所需精度之间取得平衡,并适应不同的无线电环境。
蓝牙 6 中的增强安全措施
使用信道探测的蓝牙 6 设备可以抵御距离欺骗和中间人攻击,原因如下:
- 使用标准规定的确定性随机位生成器对位模式进行随机化。
- 可以更改发射功率以降低攻击者的接收信噪比。
- 设备可以部署攻击检测器系统。
- 可以结合使用 RTT 和 PBR 来提供冗余距离测度,并更轻松地检测欺骗结果。
其他蓝牙 6 安全增强功能包括:
- 使用高级加密标准 (AES)
- 基于决策的广告过滤,可减少不必要的数据传输并减少曝光给不需要的侦听方
- 在两个设备配对时使用椭圆曲线 Diffie-Hellman 进行安全密钥生成
蓝牙 6 用例和应用
蓝牙 6 信道探测可用于:
- 无钥匙车辆进入,通过钥匙扣或手机与汽车锚点之间的通信执行
- 智能锁,仅在授权设备位于锁的指定邻近区域内时才允许访问
- 地理围栏,以限制对指定区域的访问
- 仓库管理,以监控库存和管理物流
- 对几乎任何感兴趣的目标进行资产跟踪

无钥匙进入

智能锁

地理围栏

仓库管理

资产跟踪
这些用例可以支持智能家居设备、医疗设备、供应链管理和物流的应用。
蓝牙 与 MATLAB
信道探测
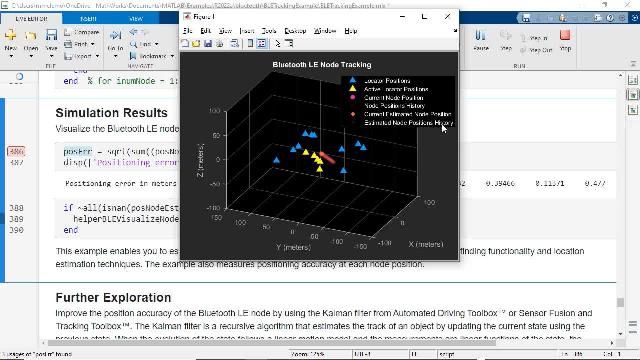
使用 MATLAB® 和 Bluetooth Toolbox,您可以对测距场景进行建模,并使用蓝牙 6 中规定的 RTT 和 PBR 测距方法估计距离。您可以指定任意数量的蓝牙定位器节点,并使用 RTT 或 PBR 执行二维或三维定位。

使用 RTT 或 PBR 可视化定位器节点跟踪的移动资产的估计位置和实际位置。(请参阅 MATLAB 代码。)
帧间间隔
您也可以研究蓝牙 6 中可变帧间间隔对异步面向连接逻辑 (ACL) 连接中的吞吐量和延迟的影响。此外,您也可以在连接同步流 (CIS) 中配置 IFS。
示例和操作方法
软件参考
另请参阅: Bluetooth Toolbox, Communications Toolbox, 蓝牙干扰, 蓝牙 mesh, 无线网络, 多目标跟踪, 超宽带 (UWB), Bluetooth と MATLAB:最適な組み合わせ