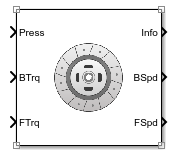
Disc Clutch
Idealized disc clutch coupler
Libraries:
Powertrain Blockset /
Drivetrain /
Couplings
Description
The Disc Clutch block implements an idealized disc clutch coupler. The block couples the rotary input and output shafts through an idealized friction model. To determine the output torque, the block uses friction parameters, relative slip velocity, and applied input pressure.
In fuel economy and powertrain efficiency studies, you can use the Disc Clutch block to model the mechanical power transfer between common driveline elements such as transmissions, engines, and differentials.
To approximate the torque response, the Disc Clutch block implements friction and dynamic models that depend on the clutch lockup condition. The block determines the locked or unlocked condition based on an idealized dry clutch friction model. This table summarizes the logic the block uses to determine the clutch condition.
| Clutch Condition | When |
|---|---|
| Unlocked | |
| Locked |
This table summarizes the friction and dynamic models that the block uses for locked or unlocked clutch conditions.
| Clutch Condition | Friction Model | Dynamic Model |
|---|---|---|
| Unlocked | and | |
| Locked |
Power Accounting
For the power accounting, the block implements these equations.
| Bus Signal | Description | Equations | ||
|---|---|---|---|---|
|
|
| Applied base power | |
PwrFlwr | Applied follower output power | |||
|
| PwrDampLoss | Damping power loss | ||
PwrCltchSlipLoss | Clutch slip power loss | |||
|
| PwrStoredBase | Rate change in base rotational kinetic energy | ||
PwrStoredFlwr | Rate change in follower rotational kinetic energy | |||
The equations use these variables.
| ωi | Input shaft angular speed |
| ωo | Output shaft angular speed |
| bi | Input shaft viscous damping |
| bo | Output shaft viscous damping |
| Ji | Input shaft moment of inertia |
| Jo | Output shaft moment of inertia |
| Tf | Frictional torque |
| Ti | Net input torque |
| Tk | Kinetic frictional torque |
| To | Net output torque |
| Ts | Static frictional torque |
| Tfmax | Maximum frictional torque before slipping |
| Pc | Applied clutch pressure |
| Peng | Engagement pressure |
| Aeff | Effective area |
| Ndisc | Number of frictional discs |
| Reff | Effective clutch radius |
| Ro | Annular disk outer radius |
| Ri | Annular disk inner radius |
| Re | Effective tire radius while under load and for a given pressure |
| μs | Coefficient of static friction |
| μk | Coefficient of kinetic friction |
Examples
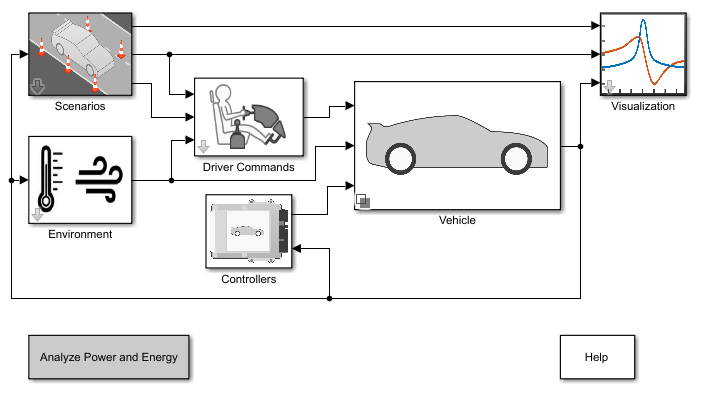
Build Conventional Vehicle Model
Build a vehicle with an internal combustion engine using the conventional vehicle reference application.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2017a