comm.Scrambler
Scramble input signal
Description
The comm.Scrambler object applies multiplicative scrambling to input data.
This schematic shows the multiplicative scrambler operation. The adders operate modulo N, where N is the value specified by the CalculationBase property.
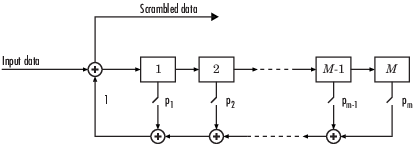
At each time step, the input causes the contents of the registers to shift sequentially. Using the Polynomial property, you specify the on or off state for each switch in the scrambler.
Note
To apply additive scrambling to input data, you can use the comm.PNSequence
System object™ and the xor function. For an example, see Additive Scrambling of Input Data.
To scramble an input signal:
Create the
comm.Scramblerobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
scrambler = comm.Scrambler
scrambler = comm.Scrambler(base,poly,cond)base, the Polynomial property set to
poly, and the InitialConditions property set to
cond.
Example: comm.Scrambler(8,'1 + x^-2 + x^-3 + x^-5 + x^-7',[0 3 2 2 5 1
7]) sets the calculation base to 8, and the scrambler polynomial
and initial conditions as specified.
scrambler = comm.Scrambler(___,Name,Value)
Example: comm.Scrambler('CalculationBase',2)
Properties
Usage
Syntax
Description
scrambledOut = scrambler(signal)
scrambledOut = scrambler(signal,initcond)
This syntax applies when you set the InitialConditionsSource
property of the object to 'Input port'.
scrambledOut = scrambler(signal,reset)
This syntax applies when you set InitialConditionsSource to
'Property' and ResetInputPort to
true.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Scramble and descramble 8-ary data using comm.Scrambler and comm.Descrambler System objects™ having a calculation base of 8.
Create scrambler and descrambler objects, specifying the calculation base, polynomial, and initial conditions using input arguments. The scrambler and descrambler polynomials are specified with different but equivalent data formats.
N = 8; scrambler = comm.Scrambler(N,'1 + x^-2 + x^-3 + x^-5 + x^-7', ... [0 3 2 2 5 1 7]); descrambler = comm.Descrambler(N,[1 0 1 1 0 1 0 1], ... [0 3 2 2 5 1 7]);
Scramble and descramble random integers. Display the original data, scrambled data, and descrambled data sequences.
data = randi([0 N-1],5,1); scrData = scrambler(data); deScrData = descrambler(scrData); [data scrData deScrData]
ans = 5×3
6 7 6
7 5 7
1 7 1
7 0 7
5 3 5
Verify that the descrambled data matches the original data.
isequal(data,deScrData)
ans = logical
1
Scramble and descramble quaternary data while changing the initial conditions between function calls.
Create scrambler and descrambler System objects having a calculation base of 4. Set the InitialConditionsSource property to 'Input port' so you can set the initial conditions as an argument to the object.
N = 4; scrambler = comm.Scrambler( ... N,'1 + z^-3', ... 'InitialConditionsSource','Input port'); descrambler = comm.Descrambler( ... N,'1 + z^-3', ... 'InitialConditionsSource','Input port');
Preallocate memory for the error vector which will be used to store errors output by the symerr function.
errVec = zeros(10,1);
Scramble and descramble random integers while changing the initial conditions, initCond, each time the loop executes. Use the symerr function to determine if the scrambling and descrambling operations result in symbol errors.
for k = 1:10 initCond = randperm(3)'; data = randi([0 N-1],5,1); scrData = scrambler(data,initCond); deScrData = descrambler(scrData,initCond); errVec(k) = symerr(data,deScrData); end
Examine errVec to verify that the output from the descrambler matches the original data.
errVec
errVec = 10×1
0
0
0
0
0
0
0
0
0
0
Digital communications systems commonly use additive scrambling to randomize input data to aid in timing synchronization and power spectral requirements. The comm.Scrambler System object™ implements multiplicative scrambling but does not support additive scrambling. To perform additive scrambling you can use the comm.PNSequence System object. This example implements the additive scrambling specified in IEEE 802.11™ by scrambling input data with an output sequence generated by the comm.PNSequence System object. For a Simulink® model that implements a similar workflow, see the Additive Scrambling of Input Data in Simulink example.
This figure shows an additive scrambler, that uses the generator polynomial , as specified in figure 17-7 of IEEE 802.11 Section 17.3.5.5 [1].
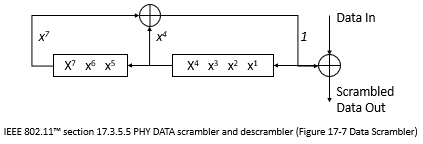
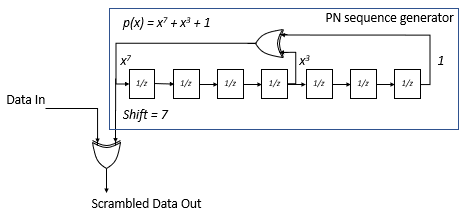
Comparing the shift register specified in 802.11 with the shift register implemented using a comm.PNSequence System object, note that the two shift register schematics are mirror images of each other. Therefore, when configuring the comm.PNSequence System object to implement an additive scrambler, you must reverse values for the generator polynomial, the initial states, and the mask output. To take the output of the register from the leading end, specify a shift value of 7.
For more information about the 802.11 scrambler, see [1] and the wlanScramble (WLAN Toolbox) reference page.
Define variables for the generator polynomial, shift value for the output, an initial shift register state, a frame of input data, and a variable containing the 127-bit scrambler sequence specified in section 17.3.5.5 of the IEEE 802.11 standard. Create a PN sequence object that initializes the registers by using an input argument.
genPoly = 'x^7 + x^3 + 1'; % Generator polynomial shift = 7; % Shift value for output spf = 127; % Samples per frame initState = [1 1 1 1 1 1 1]; % Initial shift register state dataIn = randi([0 1],spf,1); ieee802_11_scram_seq = logical([ ... 0 0 0 0 1 1 1 0 1 1 1 1 0 0 1 0 1 1 0 0 1 ... 0 0 1 0 0 0 0 0 0 1 0 0 0 1 0 0 1 1 0 0 0 ... 1 0 1 1 1 0 1 0 1 1 0 1 1 0 0 0 0 0 1 1 0 ... 0 1 1 0 1 0 1 0 0 1 1 1 0 0 1 1 1 1 0 1 1 ... 0 1 0 0 0 0 1 0 1 0 1 0 1 1 1 1 1 0 1 0 0 ... 1 0 1 0 0 0 1 1 0 1 1 1 0 0 0 1 1 1 1 1 1 1])'; pnSeq = comm.PNSequence( ... Polynomial=genPoly, ... InitialConditionsSource="Input Port", ... Mask=shift, ... SamplesPerFrame=spf, ... OutputDataType="logical"); pnsequence = pnSeq(initState);
Compare the PN sequence object output to the IEEE 802.11 127-bit scrambler sequence to confirm the generated PN sequence matches the 802.11 specified sequence.
isequal(ieee802_11_scram_seq,pnsequence)
ans = logical
1
Scramble input data according to the 802.11 specified additive scrambler by modulo-adding input data with the PN sequence output.
scrambledOut = xor(dataIn,pnSeq(initState));
Descramble the scrambled data by applying the same scrambler and initial conditions to the scrambled data.
descrambledData = xor(scrambledOut,pnSeq(initState));
Verify that the descrambled data matches the input data.
isequal(dataIn,descrambledData)
ans = logical
1
Reference
[1] IEEE Std 802.11™-2020 (Revision of IEEE Std 802.11™-2016). "Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications." IEEE Standard for Information technology — Telecommunications and information exchange between systems. Local and metropolitan area networks — Specific requirements.
Extended Capabilities
Version History
Introduced in R2012a