DPD Coefficient Estimator
Estimate memory-polynomial coefficients for digital predistortion
Libraries:
Communications Toolbox /
RF Impairments Correction
Description
Estimate the coefficients of a memory polynomial for digital pre-distortion (DPD) of a nonlinear power amplifier, given the baseband equivalent input and baseband equivalent output of the power amplifier. For more information, see Digital Predistortion and Optimizing Estimator Polynomial Degree and Memory Depth.
This icon shows the block with all ports enabled.
![]()
Examples
Apply digital predistortion (DPD) to a 16-QAM signal of random symbols. The DPD Coefficient Estimator block uses a captured signal containing from input and output signals from a power amplifier (PA) to determine the predistortion coefficient matrix. Digital predistortion of the signal preconditions is to correct impairments that the PA introduces. This model does not include a block representing the PA.
The PreLoadFcn callback initializes model parameters, and also loads workspace variables PA_Input and PA_Output from the file commpowamp_dpd_data.mat. For more information, see Model Callbacks (Simulink).
The PA_Input and PA_Output variables are baseband-equivalent signals captured at the input and output of a PA. PA_Input and PA_Output are used by the DPD Coefficient Estimator block to estimate the memory-polynomial coefficients. The memory-polynomial coefficients are input to the DPD block to predistort the PA input signal.
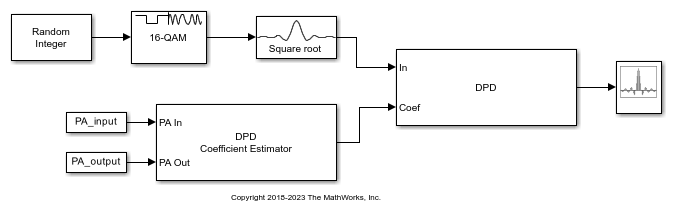
The input signal path of the model generates a random symbol stream, applies 16-QAM modulation, and then applies raised-cosine transmit filtering to the modulated signal.
The input signal is digitally predistorted in the DPD block using the memory-polynomial coefficients generated in the DPD Coefficient Estimator block. The DPD block returns the predistorted input signal for the PA that produced the distorted PA output signal.
Ports
Input
Output
Parameters
Block Characteristics
Data Types |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Algorithms
Wireless communication transmissions commonly require wide bandwidth signal transmission over a wide signal dynamic range. To transmit signals over a wide dynamic range and achieve high efficiency, RF power amplifiers (PAs) commonly operate in their nonlinear region. As this constellation diagram shows, the nonlinear behavior of a PA causes signal constellation distortions that pinch the amplitude (AM-AM distortion) and twist phase (AM-PM distortion) of constellation points proportional to the amplitude of the constellation point.

The goal of digital predistortion is to find a nonlinear function that linearizes the net effect of the PA nonlinear behavior at the PA output across the PA operating range. When the PA input is x(n), and the predistortion function is f(u(n)), where u(n) is the true signal to be amplified, the PA output is approximately equal to G×u(n), where G is the desired amplitude gain of the PA.

The digital predistorter can be configured to use a memory polynomial with or without cross terms.
The memory polynomial with cross terms predistorts the input signal as
The memory polynomial with cross terms has (M+M×M×(K-1)) coefficients for cm and amjk.
The memory polynomial without cross terms predistorts the input signal as
The polynomial without cross terms has M×K coefficients for amk.
Estimating Predistortion Function and Coefficients
The DPD coefficient estimation uses an indirect learning architecture to find function f(u(n)) to predistort input signal u(n) which precedes the PA input.
The DPD coefficient estimation algorithm models nonlinear PA memory effects based on the work in reference papers by Morgan, et al [1], and by Schetzen [2], using the theoretical foundation developed for Volterra systems.
Specifically, the inverse mapping from the PA output normalized by the PA gain, {y(n)/G}, to the PA input, {x(n)}, provides a good approximation to the function f(u(n)), needed to predistort {u(n)} to produce {x(n)}.
Referring to the memory polynomial equations above, estimates are computed for the memory-polynomial coefficients:
cm and amjk for a memory polynomial with cross terms
amk for a memory polynomial without cross terms
The memory-polynomial coefficients are estimated by using a least squares fit algorithm or a recursive least squares algorithm. The least squares fit algorithm or a recursive least squares algorithms use the memory polynomial equations above for a memory polynomial with or without cross terms, by replacing {u(n)} with {y(n)/G}. The function order and dimension of the coefficient matrix are defined by the degree and depth of the memory polynomial.
For an example that details the process of accurately estimating memory-polynomial coefficients and predistorting a PA input signal, see Digital Predistortion to Compensate for Power Amplifier Nonlinearities.
For background reference material, see the works listed in [1] and [2].
References
[1] Morgan, Dennis R., Zhengxiang Ma, Jaehyeong Kim, Michael G. Zierdt, and John Pastalan. "A Generalized Memory Polynomial Model for Digital Predistortion of Power Amplifiers." IEEE® Transactions on Signal Processing. Vol. 54, Number 10, October 2006, pp. 3852–3860.
[2] M. Schetzen. The Volterra and Wiener Theories of Nonlinear Systems. New York: Wiley, 1980.
Extended Capabilities
Version History
Introduced in R2019a