rangeangle
Range and angle calculation
Syntax
Description
The function rangeangle determines the propagation path
length and path direction of a signal from a source point or set of source points to a
reference point. The function supports two propagation models – the free
space model and the two-ray model. The
free space model is a single line-of-sight path from a source
point to a reference point. The two-ray multipath model generates
two paths. The first path follows the free-space path. The second path is a reflected
path off a boundary plane at z = 0. Path directions are defined with respect to either the global
coordinate system at the reference point or a local coordinate system at the reference
point. Distances and angles at the reference point do not depend upon which direction
the signal is travelling along the path.
[
returns the propagation path length, rng,ang]
= rangeangle(pos)rng, and direction angles,
ang, of a signal path from a source point or set of source
points, pos, to the origin of the global coordinate system. The
direction angles are the azimuth and elevation with respect to the global coordinate
axes at the origin. Signals follow a line-of-sight path from the source point to the
origin. The line-of-sight path corresponds to the geometric straight line between
the points.
[
also specifies a reference point or set of reference points,
rng,ang]
= rangeangle(pos,refpos)refpos. rng now contains the
propagation path length from the source points to the reference points. The
direction angles are the azimuth and elevation with respect to the global coordinate
axes at the reference points. You can specify multiple points and multiple reference
points.
[,
also specifies a propagation model. When rng,ang]
= rangeangle(___,model)model is set to
"freespace", the signal propagates along a line-of-sight path
from source point to reception point. When model is set to
"two-ray", the signal propagates along two paths from source
point to reception point. The first path is the line-of-sight path. The second path
is the reflecting path. In this case, the function returns the distances and angles
for two paths for each source point and corresponding reference point.
Examples
Input Arguments
Output Arguments
More About
The rangeangle function returns the path distance and path angles in
either the global or local coordinate systems. By default, the
rangeangle function determines the angle a signal path
makes with respect to global coordinates. If you add the
refaxes argument, you can compute the angles with respect
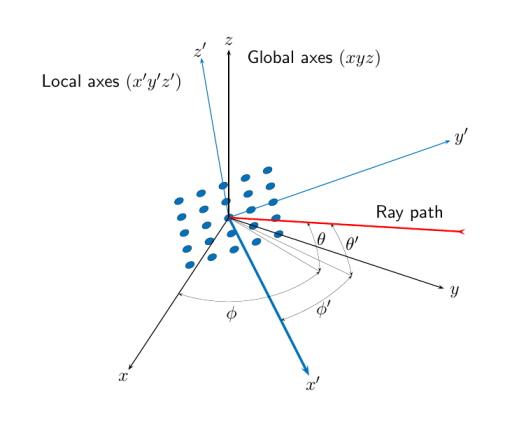
to local coordinates. As an illustration, this figure shows a 5-by-5 uniform
rectangular array (URA) rotated from the global coordinates (xyz) using refaxes. The x' axis
of the local coordinate system (x'y'z') is aligned with the main axis of the array and moves as the array
moves. The path length is independent of orientation. The global coordinate system
defines the azimuth and elevation angles (Φ,θ) and the local coordinate system defines the azimuth and elevations
angles (Φ',θ').
Local and Global Coordinate Axes
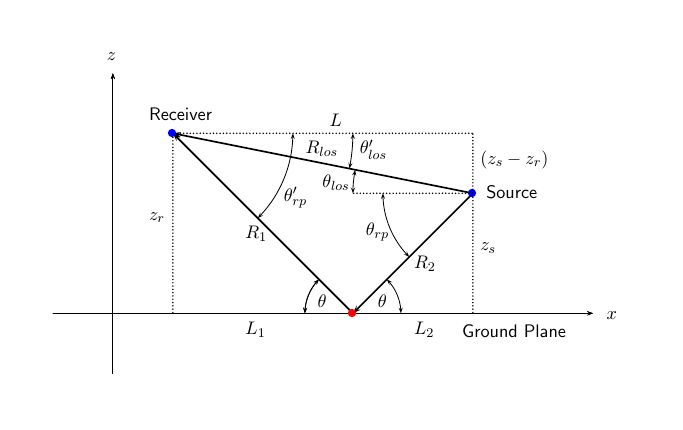
A two-ray propagation channel is the next step up in complexity from a free-space channel and is the simplest case of a multipath propagation environment. The free-space channel models a straight-line line-of-sight path from point 1 to point 2. In a two-ray channel, the medium is specified as a homogeneous, isotropic medium with a reflecting planar boundary. The boundary is always set at z = 0. There are at most two rays propagating from point 1 to point 2. The first ray path propagates along the same line-of-sight path as in the free-space channel. The line-of-sight path is often called the direct path. The second ray reflects off the boundary before propagating to point 2. According to the Law of Reflection , the angle of reflection equals the angle of incidence. In short-range simulations such as cellular communications systems and automotive radars, you can assume that the reflecting surface, the ground or ocean surface, is flat.
The figure illustrates two propagation paths. From the source
position, ss, and the receiver
position, sr, you can compute
the arrival angles of both paths, θ′los and θ′rp.
The arrival angles are the elevation and azimuth angles of the arriving
radiation with respect to a local coordinate system. In this case,
the local coordinate system coincides with the global coordinate system.
You can also compute the transmitting angles, θlos and θrp.
In the global coordinates, the angle of reflection at the boundary
is the same as the angles θrp and θ′rp.
The reflection angle is important to know when you use angle-dependent
reflection-loss data. You can determine the reflection angle by using
the rangeangle (Phased Array System Toolbox) function and
setting the reference axes to the global coordinate system. The total
path length for the line-of-sight path is shown in the figure by Rlos which
is equal to the geometric distance between source and receiver. The
total path length for the reflected path is Rrp=
R1 + R2. The
quantity L is the ground range between source and
receiver.
You can easily derive exact formulas for path lengths and angles in terms of the ground range and object heights in the global coordinate system.
Extended Capabilities
Version History
Introduced in R2019b