Sparse Second Order
Represent sparse second-order models in Simulink
Libraries:
Control System Toolbox
Description
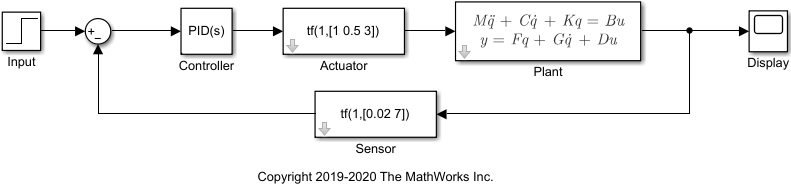
The Sparse Second Order block lets you represent second-order sparse state-space models, in Simulink®. Such sparse models arise from finite element analysis (FEA) and are useful in fields like structural analysis, fluid flow, heat transfer and electromagnetics. The resultant matrices from this type of modeling are quite large with a sparse pattern. In continuous time, a second-order sparse mass-spring-damper state-space model is represented in the following form:
Here, the full state vector is given by , where and are the displacement and velocity vectors. u and
y represent the inputs and outputs, respectively. M,
C, and K represent the mass, damping and stiffness
matrices, respectively. B is the input matrix, while F
and G are the output matrices resulting from the two components of the
state vector. D is the input-to-output matrix.
Examples
Linearize Simulink Model to a Sparse Second-Order Model Object
Linearize to a sparse second-order model object from your Simulink model using Simulink Control Design™ software.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2020b