小车倒立摆的控制
此示例使用 systune 来控制小车倒立摆。
摆/小车组件
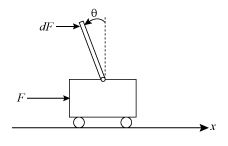
小车/摆组件如图 1 所示,并使用 Simscape™ Multibody™ 在 Simulink® 中进行建模。

图 1:小车倒立摆

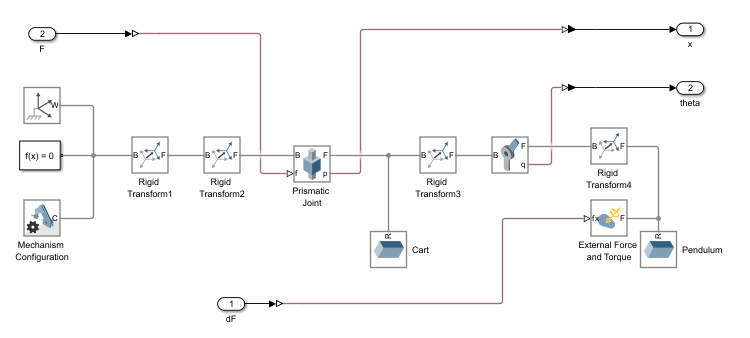
图 2:Simscape Multibody 模型
通过对小车施加可变力  来控制此系统。在将小车移动到新位置时,或者在摆受到向前的推力(冲激扰动
来控制此系统。在将小车移动到新位置时,或者在摆受到向前的推力(冲激扰动  )时,控制器需要保持摆处于直立状态。
)时,控制器需要保持摆处于直立状态。
控制结构
对于倒立摆而言,直立位置是一个不稳定的平衡状态。被控对象的这种不稳定性使得控制任务更具挑战性。对于此示例,使用以下双环控制结构:
open_system('rct_pendulum.slx') set_param('rct_pendulum','SimMechanicsOpenEditorOnUpdate','off');
内环使用一个二阶状态空间控制器,用于使摆稳定在其直立位置( 控制),而外环使用比例导数 (PD) 控制器来控制小车的位置。之所以使用 PD 控制器而不是 PID 控制器,是因为被控对象本身已提供了一定的积分作用。
控制),而外环使用比例导数 (PD) 控制器来控制小车的位置。之所以使用 PD 控制器而不是 PID 控制器,是因为被控对象本身已提供了一定的积分作用。
设计需求
使用 TuningGoal 需求来指定期望的闭环行为。指定响应时间为 3 秒,来跟踪小车位置  的设定点变化。
的设定点变化。
% Tracking of x command req1 = TuningGoal.Tracking('xref','x',3);
为了充分抑制摆顶端的冲激扰动 ,使用以下形式的 LQR 惩罚项:

该项强调较小的角度偏差 ,并限制控制力度 。
% Rejection of impulse disturbance dF Qxu = diag([16 1 0.01]); req2 = TuningGoal.LQG('dF',{'Theta','x','F'},1,Qxu);
为了保证鲁棒性,要求在被控对象的输入端至少有 6 dB 的增益裕度和 40 度的相位裕度。
% Stability margins req3 = TuningGoal.Margins('F',6,40);
最后,对闭环极点的阻尼和固有频率进行约束,以防止出现剧烈或欠阻尼的瞬态响应。
% Pole locations
MinDamping = 0.5;
MaxFrequency = 45;
req4 = TuningGoal.Poles(0,MinDamping,MaxFrequency);
控制系统调节
对于 PD 控制器和状态空间控制器的初始值(分别为 1 和  ),闭环系统是不稳定的。您可以使用
),闭环系统是不稳定的。您可以使用 systune 来联合调节这两个控制器。使用 slTuner 接口来指定可调模块,并将被控对象输入 F 注册为用于衡量稳定裕度的分析点。
ST0 = slTuner('rct_pendulum',{'Position Controller','Angle Controller'}); addPoint(ST0,'F');
接下来,使用 systune 根据上面指定的性能要求来调节 PD 控制器和状态空间控制器。在满足稳定裕度和极点位置约束(硬要求)的前提下,优化跟踪性能和抗扰性能(软要求)。
rng(0)
Options = systuneOptions('RandomStart',5);
[ST, fSoft] = systune(ST0,[req1,req2],[req3,req4],Options);
Final: Soft = 1.36, Hard = 0.99945, Iterations = 272 Final: Soft = 1.44, Hard = 0.99917, Iterations = 138 Final: Soft = 1.44, Hard = 0.99749, Iterations = 364 Final: Soft = 1.26, Hard = 0.99967, Iterations = 314 Final: Soft = 1.44, Hard = 0.99877, Iterations = 241 Final: Soft = 1.4, Hard = 0.99866, Iterations = 298
最佳设计在满足硬要求 (Hard<1) 的同时,能使软要求的值接近 1。这意味着调节后的控制系统在满足稳定裕度和极点位置约束的同时,几乎达到了目标跟踪和抗扰性能。
验证
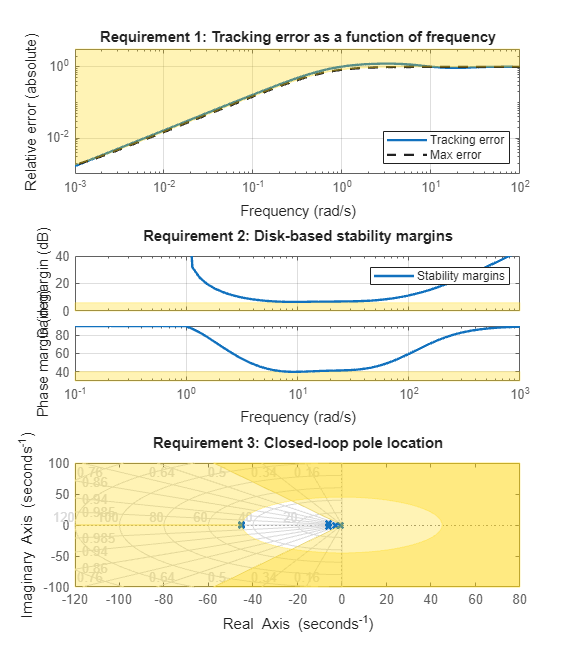
使用 viewGoal 进一步分析最佳设计如何满足各项要求。
figure('Position',[100 100 575 660])
viewGoal([req1,req3,req4],ST)
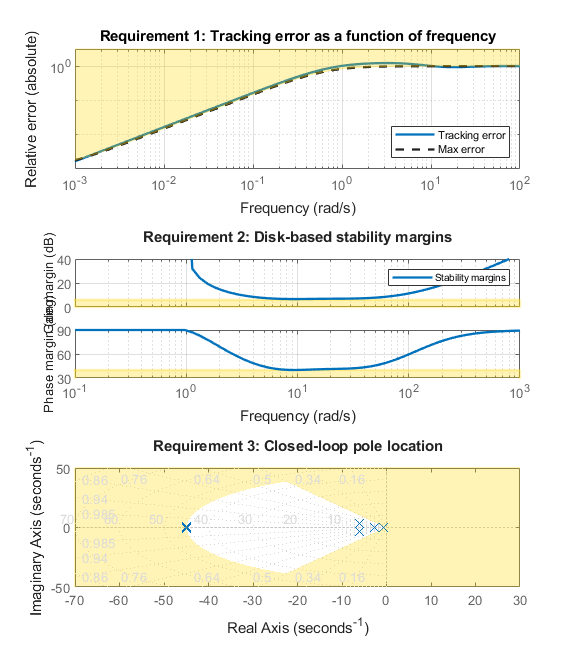
这些绘图证实,前两项要求几乎得到满足,而后两项要求则得到严格执行。接下来,绘制对位置阶跃变化以及小车所受力冲激的响应。
T = getIOTransfer(ST,{'xref','dF'},{'x','Theta'});
figure('Position',[100 100 650 420]);
subplot(121), step(T(:,1),10)
title('Tracking of set point change in position')
subplot(122), impulse(T(:,2),10)
title('Rejection of impulse disturbance')
响应曲线平滑,且达到预期的稳定时间。检查控制器的调节值。
C1 = getBlockValue(ST,'Position Controller')
C1 =
s
Kp + Kd * --------
Tf*s+1
with Kp = 5.89, Kd = 1.93, Tf = 0.051
Name: Position_Controller
Continuous-time PDF controller in parallel form.
C2 = zpk(getBlockValue(ST,'Angle Controller'))
C2 =
-1614.3 (s+12.9) (s+4.304)
--------------------------
(s+135.2) (s-14.28)
Name: Angle_Controller
Continuous-time zero/pole/gain model.
请注意,角度控制器有一个不稳定极点,它与被控对象的不稳定极点配对,从而使倒立摆稳定。为了验证这一点,获取被控对象输入端处的开环传递函数,并绘制根轨迹图。
L = getLoopTransfer(ST,'F',-1); figure rlocus(L) set(gca,'XLim',[-25 20],'YLim',[-20 20])
为了完成验证,将调节值上传到 Simulink 中,并对小车/摆组件的非线性响应进行仿真。下面是结果仿真的视频。
writeBlockValue(ST)
图 3:使用已调节控制器的小车/摆组件仿真。
仿真完成后关闭模型。
set_param('rct_pendulum','SimMechanicsOpenEditorOnUpdate','on'); close_system('rct_pendulum',0);
另请参阅
systune (Simulink Control Design) | slTuner (Simulink Control Design)
主题
- Mark Signals of Interest for Control System Analysis and Design (Simulink Control Design)
- Create and Configure slTuner Interface to Simulink Model (Simulink Control Design)