零极点位置
此示例说明如何使用 pzplot 以图形方式以及使用 pole 和 zero 以数值方式检查动态系统的零极点位置。
对于稳定性分析或辨识用于模型简化的接近相消的零极点对等任务,检查零极点位置非常有用。此示例比较两个具有相同被控对象和不同控制器的闭环系统。
创建表示这两个闭环系统的动态系统模型。
G = zpk([],[-5 -5 -10],100); C1 = pid(2.9,7.1); CL1 = feedback(G*C1,1); C2 = pid(29,7.1); CL2 = feedback(G*C2,1);
控制器 C2 具有明显更高的比例增益。在其他方面,这两个闭环系统 CL1 和 CL2 完全相同。
以图形方式检查 CL1 和 CL2 的零极点位置。
pzplot(CL1,CL2) grid
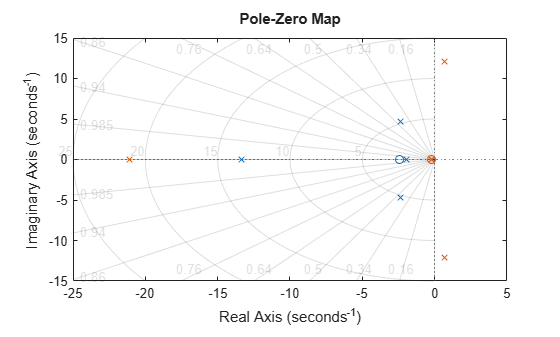
pzplot 将复平面上的零极点位置分别绘制为 x 和 o 标记。当您提供多个模型时,pzplot 用不同颜色绘制每个模型的零极点。此处,CL1 的零极点为蓝色,CL2 的零极点为绿色。
绘图显示 CL1 的所有极点都在左半平面中,因此 CL1 是稳定的。根据绘图上的径向网格标记,可以看到振荡(复)极点的阻尼约为 0.45。绘图还显示 CL2 在右半平面中包含极点,因此不稳定。
计算 CL2 的零极点位置的数值。
z = zero(CL2); p = pole(CL2);
zero 和 pole 返回包含系统零极点位置的列向量。