fnder
求函数的导数
说明
fprime = fnder(f,dorder)f 处的第 dorder 阶导数。dorder 的默认值为 1。对于负的 dorder,返回特定的 |dorder| 次不定积分,该积分在基本区间的左端点处以 |dorder| 倍消失。
输出与输入具有相同的格式,它们要么都是 pp 型,要么都是 B 型,要么都是 st 型。
如果 f 中的函数为 m 变量,则必须给定 dorder,且其长度必须为 m。
另外:
如果
f为 pp 型,或为 B 型且其最后一个节点具有足够高的多重性,则在舍入误差范围内,f与fnder(fnint(f))相同。如果
f为 pp 型,且fa是函数在基本区间左端点f处的值,则在舍入误差范围内,f与fnint(fnder(f),fa)相等,除非由f描述的函数存在跳跃不连续点。如果
f包含 f 的 B 型,且 t1 是其最左侧的节点,则在舍入误差范围内,fnint(fnder(f))包含 f – f(t1) 的 B 型。然而,其最左侧的节点将失去一个多重性(如果它最初具有大于 1 的多重性)。此外,即使在f中 f 的 B 型的最右侧节点没有满重数,其最右侧节点仍将具有满重数。要验证这一点,请创建一个样条曲线sp = spmak([0 0 1], 1)。该样条曲线在其基本区间 [0..1] 上是一条直线,当值为 0 时,曲线值为 1;当值为 1 时,曲线值为 0。现在对其导数进行积分:spdi = fnint(fnder(sp))。spdi中的样条函数具有相同的基本区间,但在该区间上,它与在 0 处为 0、在 1 处 为 -1 的直线一致。
fnder(f) 与 fnder(f,1) 相同。
示例
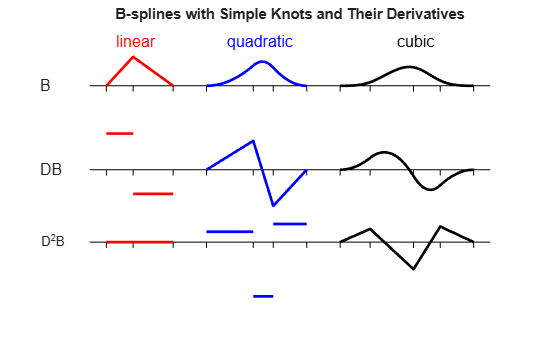
本例演示如何计算三个 B 样条(阶数分别为 2、3 和 4)的一阶和二阶导数函数。然后它绘制样条曲线及其导数,并比较结果。
% Create the knots sequences t1 = [0 .8 2]; t2 = [3 4.4 5 6]; t3 = [7 7.9 9.2 10 11]; tt = [t1 t2 t3]; % Accessory variables and commands for plotting purposes cl = ['g','r','b','k','k']; v = 5.4; d1 = 2.5; d2 = 0; s1 = 1; s2 = .5; ext = tt([1 end])+[-.5 .5]; plot(ext([1 2]),[v v],cl(5)) hold on plot(ext([1 2]),[d1 d1],cl(5)) plot(ext([1 2]),[d2 d2],cl(5)) ts = [tt;tt;NaN(size(tt))]; ty = repmat(.2*[-1;0;NaN],size(tt)); plot(ts(:),ty(:)+v,cl(5)) plot(ts(:),ty(:)+d1,cl(5)) plot(ts(:),ty(:)+d2,cl(5)) % Spline 1 (linear) b1 = spmak(t1,1); p1 = [t1;0 1 0]; % Calculate the first and second derivative of spline 1 db1 = fnder(b1); p11 = fnplt(db1,'j'); p12 = fnplt(fnder(db1)); lw = 2; plot(p1(1,:),p1(2,:)+v,cl(2),'LineWidth',lw) plot(p11(1,:),s1*p11(2,:)+d1,cl(2),'LineWidth',lw) plot(p12(1,:),s2*p12(2,:)+d2,cl(2),'LineWidth',lw) % Spline 2 (quadratic) b1 = spmak(t2,1); p1 = fnplt(b1); % Calculate the first and second derivative of spline 2 db1 = fnder(b1); p11 = [t2;fnval(db1,t2)]; p12 = fnplt(fnder(db1),'j'); plot(p1(1,:),p1(2,:)+v,cl(3),'LineWidth',lw) plot(p11(1,:),s1*p11(2,:)+d1,cl(3),'LineWidth',lw) plot(p12(1,:),s2*p12(2,:)+d2,cl(3),'LineWidth',lw) % Spline 3 (cubic) b1 = spmak(t3,1); p1 = fnplt(b1); % Calculate the first and second derivative of spline 3 db1 = fnder(b1); p11 = fnplt(db1); p12=[t3;fnval(fnder(db1),t3)]; plot(p1(1,:),p1(2,:)+v,cl(4),'LineWidth',lw) plot(p11(1,:),s1*p11(2,:)+d1,cl(4),'LineWidth',lw) plot(p12(1,:),s2*p12(2,:)+d2,cl(4),'LineWidth',lw) % Formatting the plot tey = v+1.5; text(t1(2)-.5,tey,'linear','FontSize',12,'Color',cl(2)) text(t2(2)-.8,tey,'quadratic','FontSize',12,'Color',cl(3)) text(t3(3)-.5,tey,'cubic','FontSize',12,'Color',cl(4)) text(-2,v,'B','FontSize',12) text(-2,d1,'DB','FontSize',12) text(-2,d2,'D^2B') axis([-1 12 -2 7.5]) title({'B-splines with Simple Knots and Their Derivatives'}) axis off hold off
输入参数
输出参量
限制
fnder函数不适用于有理样条。要处理有理样条,请改用fntlr函数。fnder函数仅在有限范围内适用于 st 型:如果类型为tp00,则dorder可为[1,0]或[0,1]。
算法
对于任意多项式形式的求导,fnder 函数以分段多项式意义求导。该函数分别对每个多项式段求导,并在求导过程中忽略多项式段之间的跳跃不连续性。
对于 B 型,该函数采用 [PGS; (X.10)] 公式进行求导。
对于stform,微分依赖于知道特定类型基函数相关导数的公式。
版本历史记录
在 R2006a 之前推出