Create DQN Agent Using Deep Network Designer and Train Using Image Observations
This example shows how to create a deep Q-learning network (DQN) agent that can swing up and balance a pendulum modeled in MATLAB®. In this example, you create the DQN agent using Deep Network Designer. For more information on DQN agents, see Deep Q-Network (DQN) Agent (Reinforcement Learning Toolbox).
Pendulum Swing-Up with Image MATLAB Environment
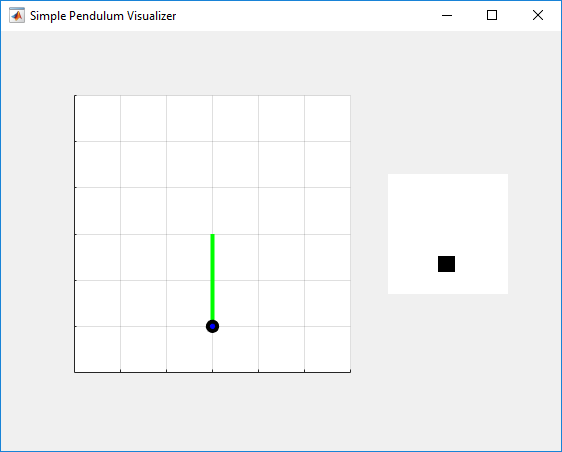
The reinforcement learning environment for this example is a simple frictionless pendulum that initially hangs in a downward position. The training goal is to make the pendulum stand upright without falling over using minimal control effort.
For this environment:
The upward balanced pendulum position is 0 radians, and the downward hanging position is
piradians.The torque action signal from the agent to the environment can take any of the five possible integer values from –2 to 2 N·m.
The observations from the environment are the simplified grayscale image of the pendulum and the pendulum angle derivative.
The reward , provided at every time step, is
Here:
is the angle of displacement from the upright position.
is the derivative of the displacement angle.
is the control effort from the previous time step.
For more information on the continuous action space version of this model, see Train DDPG Agent to Swing Up and Balance Pendulum with Image Observation (Reinforcement Learning Toolbox).
Create Environment Interface
Create a predefined environment interface for the pendulum.
env = rlPredefinedEnv("SimplePendulumWithImage-Discrete");The interface has two observations. The first observation, named "pendImage", is a 50-by-50 grayscale image.
obsInfo = getObservationInfo(env); obsInfo(1)
ans =
rlNumericSpec with properties:
LowerLimit: 0
UpperLimit: 1
Name: "pendImage"
Description: [0x0 string]
Dimension: [50 50]
DataType: "double"
The second observation, named "angularRate", is the angular velocity of the pendulum.
obsInfo(2)
ans =
rlNumericSpec with properties:
LowerLimit: -Inf
UpperLimit: Inf
Name: "angularRate"
Description: [0x0 string]
Dimension: [1 1]
DataType: "double"
The interface has a discrete action space where the agent can apply one of five possible torque values to the pendulum: –2, –1, 0, 1, or 2 N·m.
actInfo = getActionInfo(env)
actInfo =
rlFiniteSetSpec with properties:
Elements: [-2 -1 0 1 2]
Name: "torque"
Description: [0x0 string]
Dimension: [1 1]
DataType: "double"
Fix the random generator seed for reproducibility.
rng(0)
Construct Critic Network Using Deep Network Designer
DQN agents use a parametrized Q-value function approximator to estimate the value of the policy. Since a DQN agent has a discrete action space, you can use a vector (that is multi-output) Q-value function critic, which is generally more efficient than a comparable single-output critic. However, for this example, use a standard single-output Q-value function critic.
To model the parametrized Q-value function within the critic, use a neural network with three input layers (two for the observation channels, as specified by obsInfo, and the other for the action channel, as specified by actInfo) and one output layer (which returns the scalar value). For more information on creating Q-value function approximators based on a deep neural network, see Create Policies and Value Functions (Reinforcement Learning Toolbox).
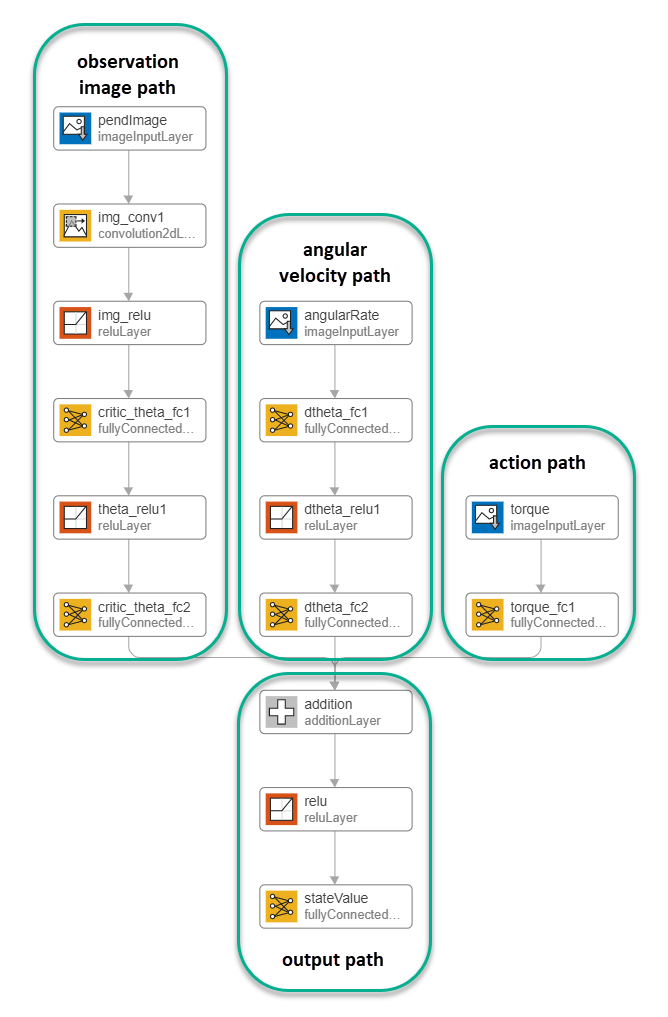
Construct the critic network interactively by using the Deep Network Designer app. To do so, you first create separate input paths for each observation and action. These paths learn lower-level features from their respective inputs. You then create a common output path that combines the outputs from the input paths.
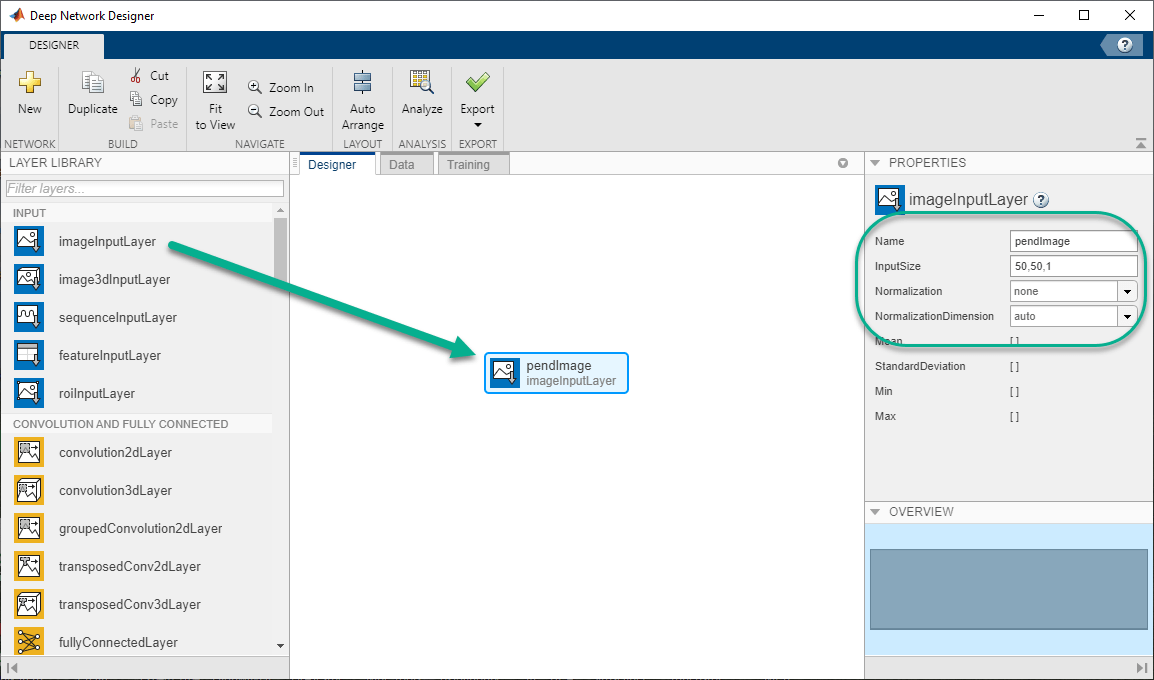
Create Image Observation Path
To create the image observation path, first drag an imageInputLayer from the Layer Library pane to the canvas. Set the layer InputSize to 50,50,1 for the image observation, and set Normalization to none.
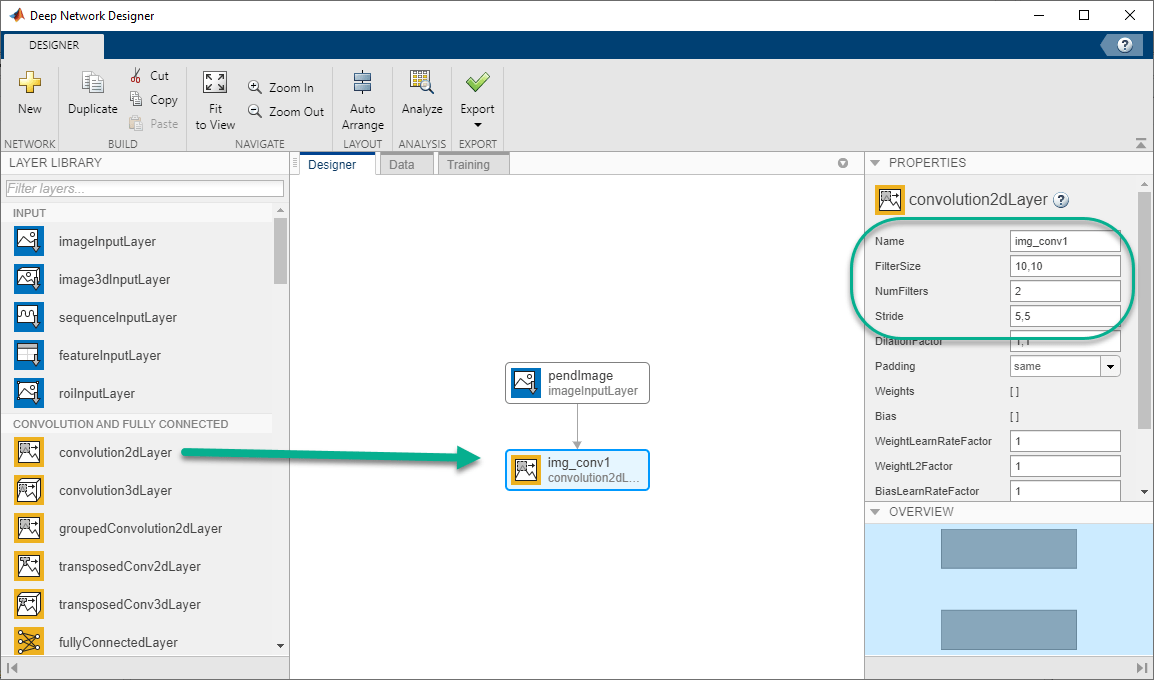
Second, drag a convolution2DLayer to the canvas and connect the input of this layer to the output of the imageInputLayer. Create a convolution layer with 2 filters (NumFilters property) that have a height and width of 10 (FilterSize property), and use a stride of 5 in the horizontal and vertical directions (Stride property).
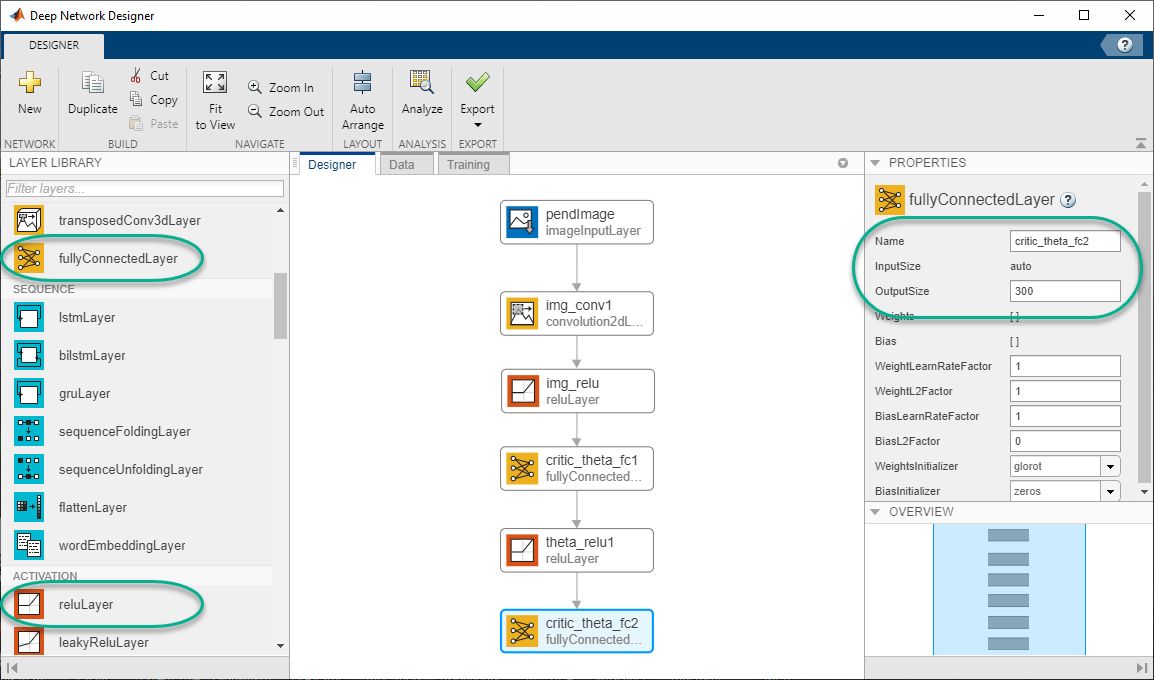
Finally, complete the image path network with two sets of reLULayer and fullyConnectedLayer layers. The output sizes of the first and second fullyConnectedLayer layers are 400 and 300, respectively.
Create All Input Paths and Output Path
Construct the other input paths and the output path in a similar manner. For this example, use the following options.
Angular velocity path (scalar input):
imageInputLayer— Set InputSize to1,1and Normalization tonone.fullyConnectedLayer— Set OutputSize to400.reLULayerfullyConnectedLayer— Set OutputSize to300.
Action path (scalar input):
imageInputLayer— Set InputSize to1,1and Normalization tonone.fullyConnectedLayer— Set OutputSize to300.
Output path:
additionLayer— Connect the output of all input paths to the input of this layer.reLULayerfullyConnectedLayer— Set OutputSize to1for the scalar value function.
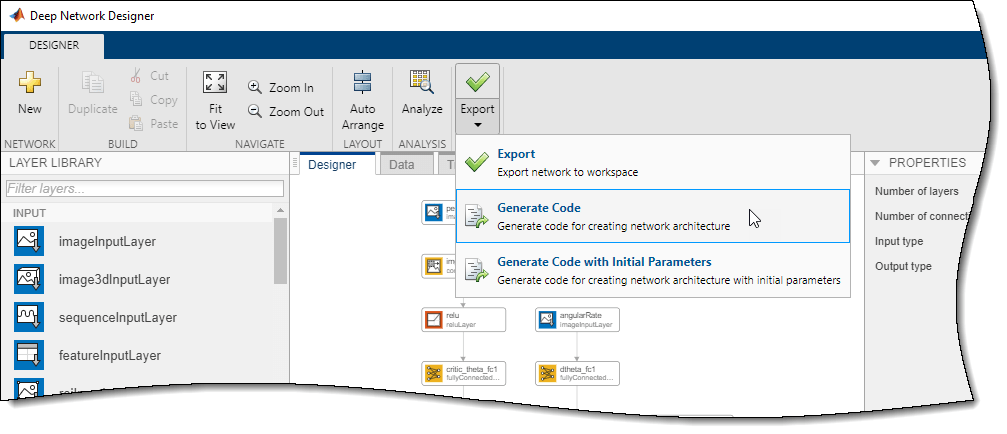
Export Network from Deep Network Designer
To export the network to the MATLAB workspace, in Deep Network Designer, click Export. Deep Network Designer exports the network as a new variable containing the network layers. You can create the critic representation using this layer network variable.
Alternatively, to generate equivalent MATLAB code for the network, click Export > Generate Network Code Without Parameters.
The generated code is as follows.
net = dlnetwork();
tempLayers = [
imageInputLayer([1 1 1],"Name","angularRate","Normalization","none")
fullyConnectedLayer(400,"Name","dtheta_fc1")
reluLayer("Name","dtheta_relu1")
fullyConnectedLayer(300,"Name","dtheta_fc2")];
net = addLayers(net,tempLayers);
tempLayers = [
imageInputLayer([1 1 1],"Name","torque","Normalization","none")
fullyConnectedLayer(300,"Name","torque_fc1")];
net = addLayers(net,tempLayers);
tempLayers = [
imageInputLayer([50 50 1],"Name","pendImage","Normalization","none")
convolution2dLayer([10 10],2,"Name","img_conv1","Padding","same","Stride",[5 5])
reluLayer("Name","relu_1")
fullyConnectedLayer(400,"Name","critic_theta_fc1")
reluLayer("Name","theta_relu1")
fullyConnectedLayer(300,"Name","critic_theta_fc2")];
net = addLayers(net,tempLayers);
tempLayers = [
additionLayer(3,"Name","addition")
reluLayer("Name","relu_2")
fullyConnectedLayer(1,"Name","stateValue")];
net = addLayers(net,tempLayers);
net = connectLayers(net,"torque_fc1","addition/in3");
net = connectLayers(net,"critic_theta_fc2","addition/in1");
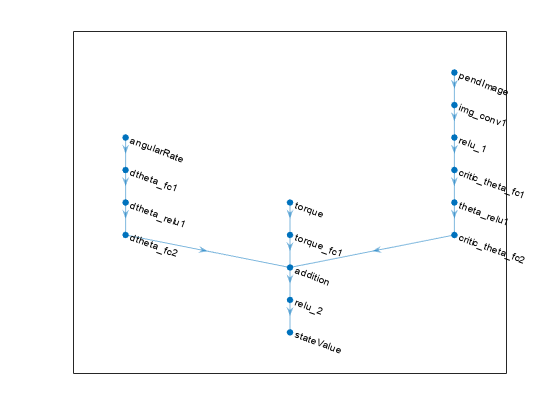
net = connectLayers(net,"dtheta_fc2","addition/in2");View the critic network configuration.
figure plot(net)
Initialize the dlnetwork object and display the number of parameters.
net = initialize(net); summary(net)
Initialized: true
Number of learnables: 322.9k
Inputs:
1 'angularRate' 1x1x1 images
2 'torque' 1x1x1 images
3 'pendImage' 50x50x1 images
Create the critic using the neural network, the action and observation specifications, and the names of the input layers to be connected to the observations and action channels. For more information, see rlQValueFunction (Reinforcement Learning Toolbox).
critic = rlQValueFunction(net,obsInfo,actInfo,... "ObservationInputNames",["pendImage","angularRate"], ... "ActionInputNames","torque");
Specify options for the critic using rlOptimizerOptions.
criticOpts = rlOptimizerOptions(LearnRate=1e-03,GradientThreshold=1);
Specify the DQN agent options using rlDQNAgentOptions (Reinforcement Learning Toolbox). Include the training options for the actor and critic.
agentOpts = rlDQNAgentOptions(... UseDoubleDQN=false,... CriticOptimizerOptions=criticOpts,... ExperienceBufferLength=1e6,... SampleTime=env.Ts);
You can also set or modify agent options using dot notation.
agentOpts.EpsilonGreedyExploration.EpsilonDecay = 1e-5;
Alternatively, you can create the agent first, and then modify its options using dot notation.
Create the DQN agent using the critic and the agent options object. For more information, see rlDQNAgent (Reinforcement Learning Toolbox).
agent = rlDQNAgent(critic,agentOpts);
Train Agent
To train the agent, first specify the training options. For this example, use the following options.
Run each training for at most 5000 episodes, with each episode lasting at most 500 time steps.
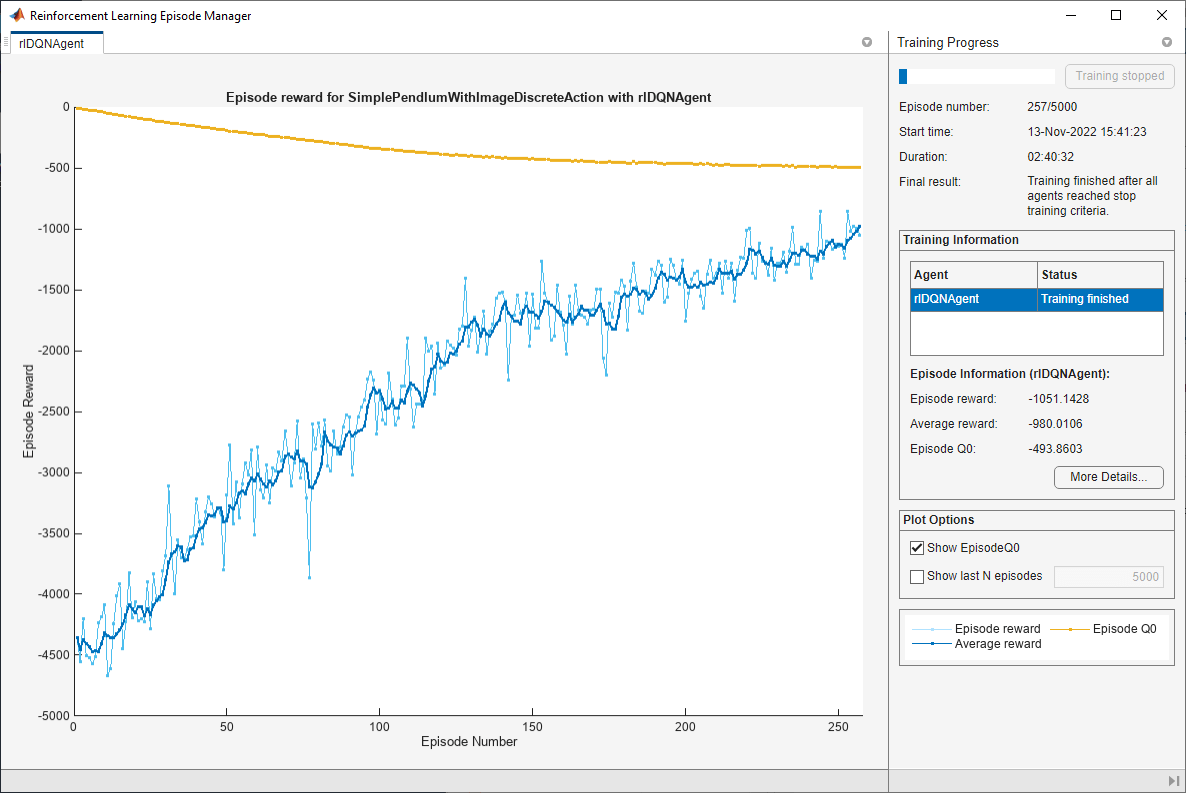
Display the training progress in the Episode Manager dialog box (set the
Plotsoption) and disable the command line display (set theVerboseoption tofalse).Stop training when the agent receives an average cumulative reward greater than –1000 over the default window length of five consecutive episodes. At this point, the agent can quickly balance the pendulum in the upright position using minimal control effort.
For more information, see rlTrainingOptions (Reinforcement Learning Toolbox).
trainOpts = rlTrainingOptions(... MaxEpisodes=5000,... MaxStepsPerEpisode=500,... Verbose=false,... Plots="training-progress",... StopTrainingCriteria="AverageReward",... StopTrainingValue=-1000);
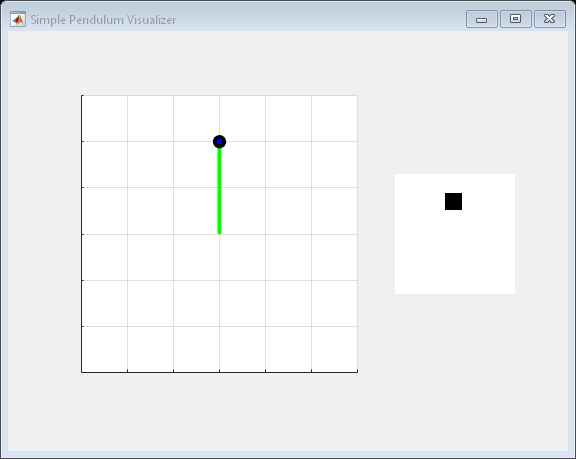
Visualize the pendulum system during training or simulation using the plot function.
plot(env)
Train the agent using the train (Reinforcement Learning Toolbox) function. This is a computationally intensive process that takes several hours to complete. To save time while running this example, load a pretrained agent by setting doTraining to false. To train the agent yourself, set doTraining to true.
doTraining = false; if doTraining % Train the agent. trainingStats = train(agent,env,trainOpts); else % Load pretrained agent for the example. load("MATLABPendImageDQN.mat","agent"); end
Simulate DQN Agent
To validate the performance of the trained agent, simulate it within the pendulum environment. For more information on agent simulation, see rlSimulationOptions (Reinforcement Learning Toolbox) and sim (Reinforcement Learning Toolbox).
simOptions = rlSimulationOptions(MaxSteps=500); experience = sim(env,agent,simOptions);
totalReward = sum(experience.Reward)
totalReward = -713.0336
See Also
Deep Network
Designer | rlDQNAgent (Reinforcement Learning Toolbox)
Related Topics
- Train DQN Agent to Swing Up and Balance Pendulum (Reinforcement Learning Toolbox)
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asia Pacific
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)