Train DQN Agent to Swing Up and Balance Pendulum
This example shows how to train a deep Q-learning network (DQN) agent to swing up and balance a pendulum modeled in Simulink®.
For more information on DQN agents, see Deep Q-Network (DQN) Agent. For an example that trains a DQN agent in MATLAB®, see Train DQN Agent to Balance Discrete Cart-Pole System.
Fix Random Number Stream for Reproducibility
The example code might involve computation of random numbers at various stages. Fixing the random number stream at the beginning of various sections in the example code preserves the random number sequence in the section every time you run it, and increases the likelihood of reproducing the results. For more information, see Results Reproducibility.
Fix the random number stream with seed 0 and random number algorithm Mersenne twister. For more information on controlling the seed used for random number generation, see rng.
previousRngState = rng(0,"twister");The output previousRngState is a structure that contains information about the previous state of the stream. You will restore the state at the end of the example.
Pendulum Swing-Up Model
The reinforcement learning environment for this example is a simple frictionless pendulum that initially hangs in a downward position. The training goal is to make the pendulum stand upright using minimal control effort.
Open the model.
mdl = "rlSimplePendulumModel";
open_system(mdl)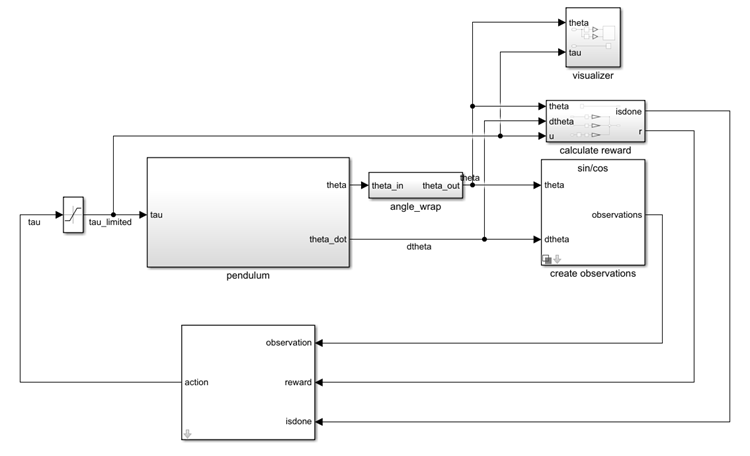
In this model:
The balanced, upright pendulum position is zero radians, and the downward hanging pendulum position is
piradians.The torque action signal from the agent to the environment is from –2 to 2 N·m.
The observations from the environment are the sine of the pendulum angle, the cosine of the pendulum angle, and the pendulum angle derivative.
The reward , provided at every time step, is
Here:
is the angle of displacement from the upright position.
is the derivative of the displacement angle.
is the control effort from the previous time step.
For more information on this model, see Load Predefined Control System Environments.
Create Environment Object
Create a predefined environment object for the pendulum.
env = rlPredefinedEnv("SimplePendulumModel-Discrete")env =
SimulinkEnvWithAgent with properties:
Model : rlSimplePendulumModel
AgentBlock : rlSimplePendulumModel/RL Agent
ResetFcn : []
UseFastRestart : on
The object has a discrete action space where the agent can apply one of three possible torque values to the pendulum: –2, 0, or 2 N·m.
To define the initial condition of the pendulum as hanging downward, specify an environment reset function using an anonymous function handle. This reset function sets the model workspace variable theta0 to pi.
env.ResetFcn = @(in)setVariable(in,"theta0",pi,"Workspace",mdl);
Get the observation and action specification information from the environment.
obsInfo = getObservationInfo(env)
obsInfo =
rlNumericSpec with properties:
LowerLimit: -Inf
UpperLimit: Inf
Name: "observations"
Description: [0×0 string]
Dimension: [3 1]
DataType: "double"
actInfo = getActionInfo(env)
actInfo =
rlFiniteSetSpec with properties:
Elements: [3×1 double]
Name: "torque"
Description: [0×0 string]
Dimension: [1 1]
DataType: "double"
Specify the agent sample time Ts and the simulation time Tf in seconds.
Ts = 0.05; Tf = 20;
Create DQN Agent
When you create the agent, the initial parameters of the critic network are initialized with random values. Fix the random number stream so that the agent is always initialized with the same parameter values.
rng(0,"twister");Create an agent initialization object to initialize the critic network with the hidden layer size 256.
initOpts = rlAgentInitializationOptions(NumHiddenUnit=256);
Specify the agent options for training using rlDQNAgentOptions and rlOptimizerOptions objects. For this training:
Specify the critic learning rate to be
5e-3. A large learning rate causes drastic updates which may lead to divergent behaviors, while a low value may require many updates before reaching the optimal point.Use a gradient threshold of 5 to clip the gradients. Clipping the gradients can improve training stability.
Use mini-batches of 256 experiences. Smaller mini-batches are computationally efficient but may introduce variance in training. By contrast, larger batch sizes can make the training stable but require higher memory.
Update the target critic network every 4 learning iterations with a smoothing factor of
5e-3.Do not use the double-DQN algorithm.
optimOpts = rlOptimizerOptions(LearnRate=5e-3, GradientThreshold=5); agentOptions = rlDQNAgentOptions( ... SampleTime=Ts,... CriticOptimizerOptions=optimOpts,... ExperienceBufferLength=1e5,... TargetSmoothFactor=5e-3,... UseDoubleDQN=false,... MiniBatchSize=256);
A DQN agent uses the epsilon-greedy algorithm to explore the action space during training. Specify a decay rate of 5e-5 for the epsilon value to gradually decay during training until the minimum value of 0.1 is reached. This promotes exploration towards the beginning when the agent does not have a good policy, and exploitation towards the end when the agent has learned the optimal policy.
agentOptions.EpsilonGreedyExploration.EpsilonDecay = 5e-5; agentOptions.EpsilonGreedyExploration.EpsilonMin = 0.1;
Create the DQN agent using the observation and action input specifications, initialization options and agent options.
agent = rlDQNAgent(obsInfo,actInfo,initOpts,agentOptions);
For more information, see rlDQNAgent.
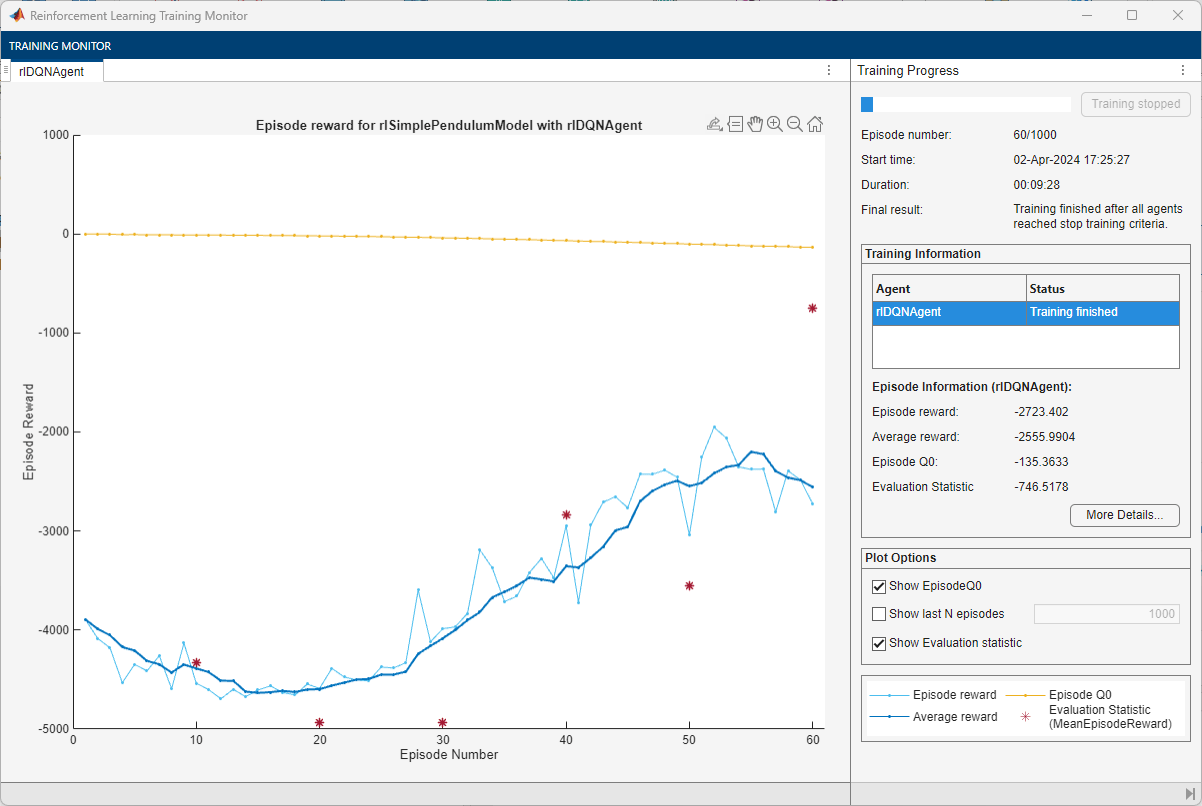
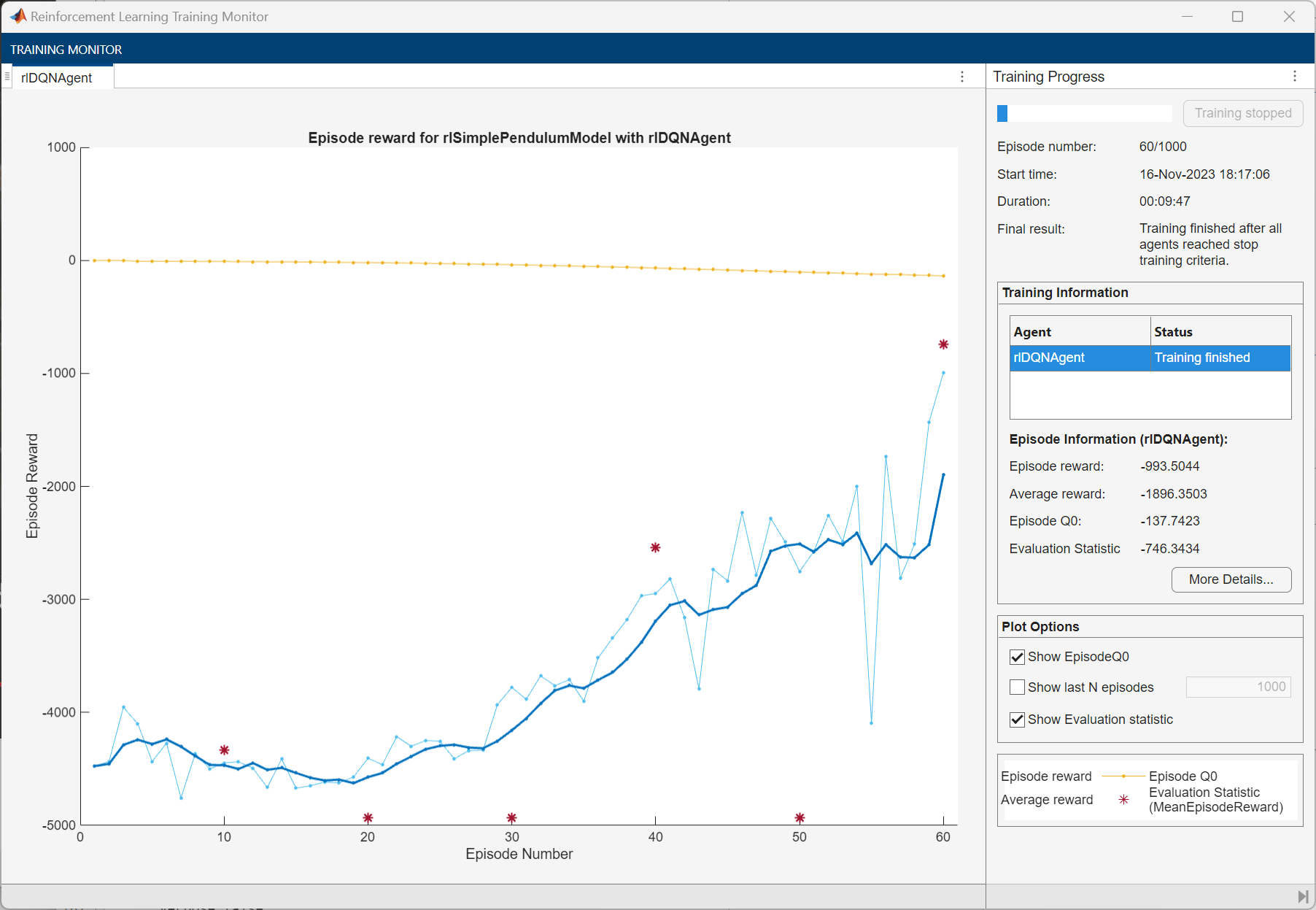
Train Agent
To train the agent, first specify the training options. For this example, use the following options.
Run each training for a maximum of 1000 episodes, with each episode lasting at most 500 time steps.
Display the training progress in the Reinforcement Learning Training Monitor dialog box (set the
Plotsoption) and disable the command line display (set theVerboseoption tofalse).Evaluate the performance of the greedy policy every 10 training episodes.
Stop training when the agent receives an average cumulative reward greater than –1100 when evaluating the deterministic policy. At this point, the agent can quickly balance the pendulum in the upright position using minimal control effort.
Save a copy of the agent for each episode where the cumulative reward is greater than –1100.
For more information on training options, see rlTrainingOptions.
% training options trainingOptions = rlTrainingOptions(... MaxEpisodes=1000,... MaxStepsPerEpisode=500,... ScoreAveragingWindowLength=5,... Verbose=false,... Plots="training-progress",... StopTrainingCriteria="EvaluationStatistic",... StopTrainingValue=-1100,... SaveAgentCriteria="EvaluationStatistic",... SaveAgentValue=-1100); % agent evaluator evl = rlEvaluator(EvaluationFrequency=10, NumEpisodes=1);
Fix the random stream for reproducibility.
rng(0,"twister");Train the agent using the train function. Training this agent is a computationally intensive process that takes several minutes to complete. To save time while running this example, load a pretrained agent by setting doTraining to false. To train the agent yourself, set doTraining to true.
doTraining =false; if doTraining % Train the agent. trainingStats = train(agent,env,trainingOptions, ... Evaluator=evl); else % Load the pretrained agent for the example. load("SimulinkPendulumDQNMulti.mat","agent"); end
Simulate DQN Agent
Fix the random stream for reproducibility.
rng(0,"twister");To validate the performance of the trained agent, simulate it within the pendulum environment. For more information on agent simulation, see rlSimulationOptions and sim.
simOptions = rlSimulationOptions(MaxSteps=500); experience = sim(env,agent,simOptions);
Restore the random number stream using the information stored in previousRngState.
rng(previousRngState);
See Also
Apps
Functions
Objects
rlDQNAgent|rlDQNAgentOptions|rlVectorQValueFunction|rlTrainingOptions|rlSimulationOptions|rlOptimizerOptions
Blocks
Topics
- Train DDPG Agent to Swing Up and Balance Pendulum
- Train DDPG Agent to Swing Up and Balance Pendulum with Bus Signal
- Create DQN Agent Using Deep Network Designer and Train Using Image Observations
- Load Predefined Control System Environments
- Deep Q-Network (DQN) Agent
- Create Custom Simulink Environments
- Train Reinforcement Learning Agents