Bird's-Eye Scope
Visualize sensor coverages, detections, and tracks
Description
The Bird's-Eye Scope visualizes aspects of a driving scenario or RoadRunner scenario found in your Simulink® model.
Using the scope, you can:
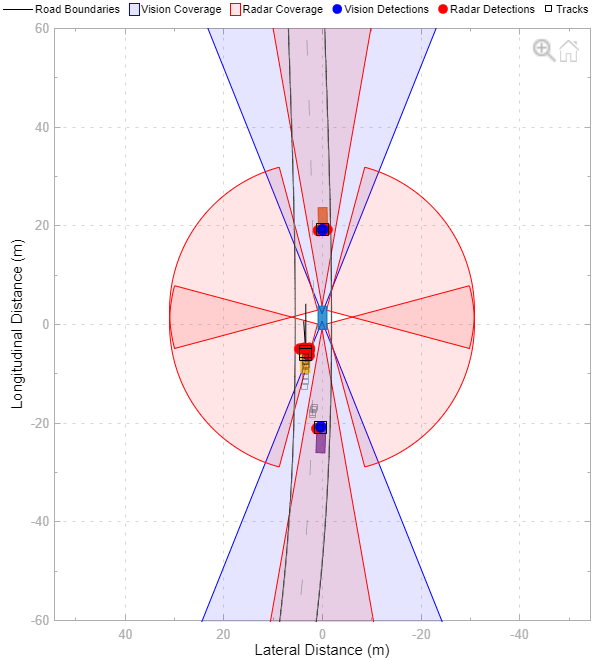
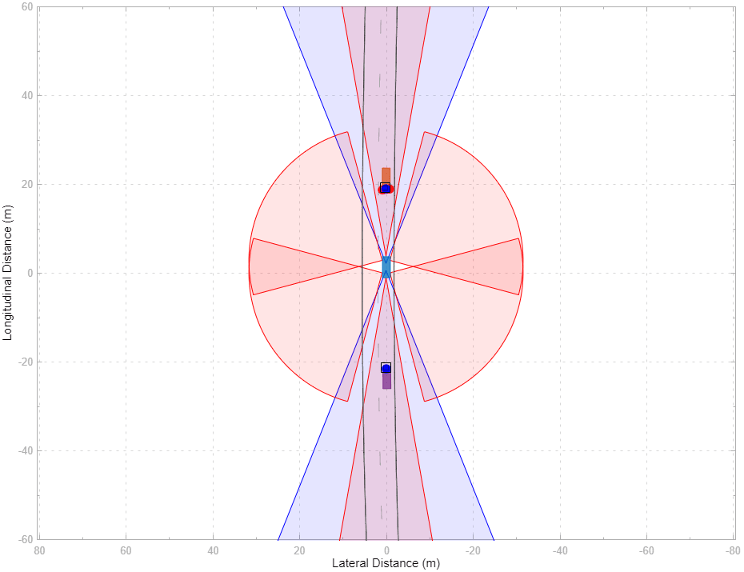
Inspect the coverage areas of radar, vision, lidar and ultrasonic sensors.
Modify sensor parameters and analyze the sensor detections of actors, road boundaries, and lane boundaries.
Analyze the tracking results of moving actors within the scenario.
Record and playback sensor detection and tracking data.
To get started, open the scope and click Find Signals. The scope updates the block diagram, finds signals representing aspects of the driving scenario, organizes the signals into groups, and displays the signals. You can then analyze the signals as you simulate, organize the signals into new groups, and modify the graphical display of the signals.
For more details about using the scope with a driving scenario, see Visualize Sensor Data and Tracks in Bird's-Eye Scope.
For more details about using the scope with a RoadRunner scenario, see Add Sensors to RoadRunner Scenario Using Simulink.
Note
The Bird's-Eye Scope app requires that you enable signal logging in
Simulink. You must ensure that the Signal logging (Simulink) configuration parameter in your model is set to
on before simulation.
Open the Bird's-Eye Scope App
Simulink Toolstrip:
On the Simulation tab, under Review Results, click Bird's-Eye Scope.
On the Apps tab, under Signal Processing and Wireless Communications, click Bird's-Eye Scope.
Examples
- Visualize Sensor Data and Tracks in Bird's-Eye Scope
- Visualize Sensor Data from Unreal Engine Simulation Environment
- Add Sensors to RoadRunner Scenario Using Simulink
- Sensor Fusion Using Synthetic Radar and Vision Data in Simulink
- Lane Following Control with Sensor Fusion and Lane Detection
- Autonomous Emergency Braking with Sensor Fusion
- Test Open-Loop ADAS Algorithm Using Driving Scenario
- Test Closed-Loop ADAS Algorithm Using Driving Scenario
Parameters
Limitations
General Limitations
Referenced models are not supported. To visualize signals that are within referenced models, move the output of these signals to the top-level model.
Rapid accelerator mode is not supported.
External mode and simulating a model from a generated executable is not supported.
If you initialize your model in fast restart, then after the first time you simulate, the Find Signals or Update Signals button is disabled. To enable Find Signals or Update Signals again, on the Debug tab of the Simulink toolstrip, click Fast Restart.
Scenario Reader Block Limitations
The Bird's-Eye Scope does not support visualization in a model that contains:
More than one Scenario Reader block.
A Scenario Reader block within a nonvirtual subsystem, such as an atomic or enabled subsystem.
A Scenario Reader block that is configured to output actors and lane boundaries in world coordinates (Coordinate system of outputs parameter set to
World Coordinates).
For Scenario Reader blocks in which you specify the ego vehicle using the Ego Vehicle input port, the ego vehicle signal must be connected directly to the block. Visualization of ego vehicle signals that are output from a nonvirtual subsystem or referenced model are not supported.
3D Simulation Block Limitations
The visualization of roads, lanes, and actors from Simulation 3D Scene Configuration blocks is not supported. If your block contains a Simulation 3D Scene Configuration block, the Bird's-Eye Scope still displays an ego vehicle, but it has default vehicle dimensions.
RoadRunner Scenario Simulation Limitations
Bird's-Eye Scope supports visualization of these lane marking types from RoadRunner scenario simulation:
Single solid
Double solid
Dashed single
Dashed solid
Dashed double
Any other type of lane markings are not supported.
Simulation Record and Playback Limitations
The Bird's-Eye Scope app supports recording data for only a single simulation run.
Recorded simulation data is only present in the memory as long as the corresponding MATLAB instance is active.
More About
In the Bird's-Eye Scope, the default view displays the driving scenario in vehicle coordinates. During simulation, this view displays the scenario from the perspective of the ego vehicle. Use this view to inspect aspects of the scenario in the immediate vicinity of the ego vehicle.
You can also display the driving scenario in world coordinates. On the scope toolstrip, click World Coordinates to open the World Coordinates View window. Use this window to view the scenario as a whole. You can also use this view to inspect the trajectories of actors that are not in the immediate vicinity of the ego vehicle.
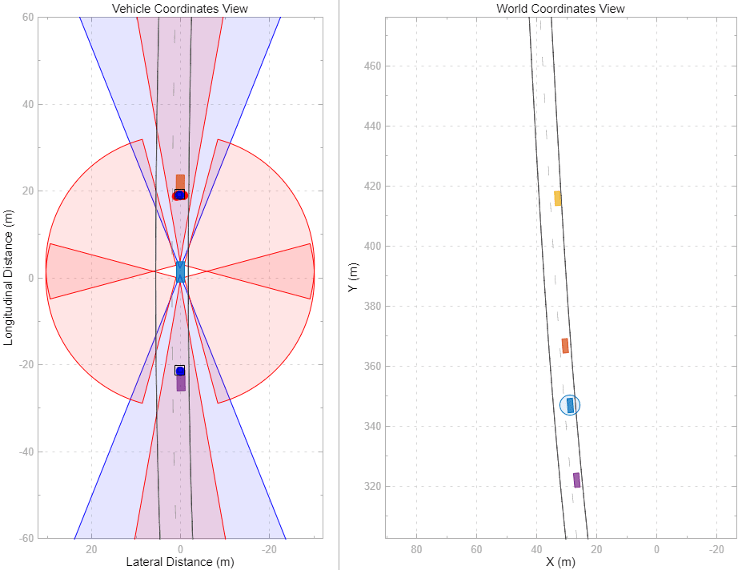
To display the roads and lanes within the World Coordinates View, click Find Signals. To display the ego vehicle and other actors in the scenario, run the simulation. This view does not display detections, tracks, sensor coverage areas, and other applicable signals. You can view these signals only in the Vehicle Coordinates View window.
Note
In the World Coordinates View window, the circle around the ego vehicle highlights the location of the vehicle in the scenario. It is not a sensor coverage area.
Tips
To find the source of a signal within the model, in the left pane of the scope, right-click a signal and select Highlight in Model.
You can show or hide signals while simulating. For example, to hide a sensor coverage, first select it from the left pane. Then, from the Properties tab, clear the Show Sensor Coverage check box.
When you reopen the scope after saving and closing a model, the scope canvas is initially blank. If you clicked Find Signals in a previous session, then click Run to run the simulation and visualize the previously found signals. The signals have the same properties from when you last saved the model. If you did not make a graphical change to the scope when you previously had it open, then the Run button is not enabled until you click Find Signals. Graphical changes include dragging signals to new groups, enabling the legend or World Coordinates View window, changing axes limits, or changing the visual properties of actors, lane markings, or sensor coverage areas.
To log and visualize new signals, click Update Signals, and then click Run to run the simulation.
If the simulation runs too quickly, you can slow it down by using simulation pacing. On the Simulation tab of the Simulink toolstrip, select Run > Simulation Pacing. Then, select the Enable pacing to slow down simulation check box and decrease the simulation time to less than the default of one second per wall clock second.
To better inspect the scenario, you can pan and zoom within the Vehicle Coordinates View and World Coordinates View windows. To return to the default display of either window, in the upper-right corner of that window, click the home button
 .
.
Version History
Introduced in R2018b