synchronize
Syntax
Description
Add-On Required: This feature requires the Scenario Builder for Automated Driving Toolbox add-on.
synchronize(
synchronizes data in the input sensor data object sensorDataObj,refSensorData)sensorDataObj with
reference to the timestamps in the input reference sensor object
refSensorData.
synchronize(
resamples data in the input sensor data object sensorDataObj,NewTimestamps=newTimestamps)sensorDataObj with
reference to the specified new timestamps newTimestamps.
synchronize(
resamples data in the input sensor data object sensorDataObj,SampleTime=dt)sensorDataObj with a
specified regularly spaced sample time, dt.
synchronize(
resamples data in the input sensor data object sensorDataObj,SampleRate=Fs)sensorDataObj with the
specified sample rate Fs.
synchronize(___,Method=
resamples data in the input sensor data object method)sensorDataObj using the
specified synchronization method method in addition to any combination
of input arguments from previous syntaxes.
sensorDataSynchronized = synchronize(___)sensorDataSynchronized.
Examples
Load recorded GPS data into the workspace. The data contains GPS information recorded from two sensors as the structures qComGPS and uBloxGPS.
load("comma_gps_data.mat")Initialize a GPSData object using information from the loaded GPS data qComGPS.
qcomGPSData = scenariobuilder.GPSData(qComGPS.Timestamps,qComGPS.Lat,qComGPS.Long,qComGPS.Alt,Name="qcomGPS")qcomGPSData =
GPSData with properties:
Name: "qcomGPS"
NumSamples: 28
Duration: 57.9996
SampleRate: 0.4828
SampleTime: 2.1481
Timestamps: [28×1 double]
Latitude: [28×1 double]
Longitude: [28×1 double]
Altitude: [28×1 double]
Attributes: []
Initialize another GPSData object using information from the loaded GPS data uBloxGPS.
ubloxGPSData = scenariobuilder.GPSData(uBloxGPS.Timestamps,uBloxGPS.Lat,uBloxGPS.Long,uBloxGPS.alt,Name = "ubloxGPS")ubloxGPSData =
GPSData with properties:
Name: "ubloxGPS"
NumSamples: 599
Duration: 59.8830
SampleRate: 10.0028
SampleTime: 0.1001
Timestamps: [599×1 double]
Latitude: [599×1 double]
Longitude: [599×1 double]
Altitude: [599×1 double]
Attributes: []
Synchronize the qComGPS sensor data with the uBloxGPS sensor data.
synchronize(qcomGPSData,ubloxGPSData)
Display the qComGPS data that has been synchronized with the uBloxGPS GPS data. Observe that the synchronized qComGPS sensor data contains the same number of samples as uBloxGPS sensor data.
disp(qcomGPSData)
GPSData with properties:
Name: "qcomGPS"
NumSamples: 599
Duration: 59.8830
SampleRate: 10.0028
SampleTime: 0.1001
Timestamps: [599×1 double]
Latitude: [599×1 double]
Longitude: [599×1 double]
Altitude: [599×1 double]
Attributes: []
Load recorded GPS data into the workspace.
load("recordedGPSData.mat")Initialize a GPSData object using information from the loaded GPS data.
gpsData = scenariobuilder.GPSData(timestamps,latitudes,longitudes,altitudes)
gpsData =
GPSData with properties:
Name: ''
NumSamples: 392
Duration: 19.5498
SampleRate: 20.0513
SampleTime: 0.0500
Timestamps: [392×1 double]
Latitude: [392×1 single]
Longitude: [392×1 single]
Altitude: [392×1 single]
Attributes: []
Specify the new timestamps to which to resample the data.
newTimestamps = linspace(gpsData.Timestamps(1),gpsData.Timestamps(end),100);
Resample the data using the new timestamps.
synchronize(gpsData,NewTimestamps=newTimestamps)
Display the resampled GPS data. Observe that the number of samples in the resampled GPS sensor data matched the number of specified new timestamps.
disp(gpsData)
GPSData with properties:
Name: ''
NumSamples: 100
Duration: 19.5498
SampleRate: 5.1151
SampleTime: 0.1975
Timestamps: [100×1 double]
Latitude: [100×1 single]
Longitude: [100×1 single]
Altitude: [100×1 single]
Attributes: []
Load recorded GPS data into the workspace.
load("recordedGPSData.mat")Initialize a GPSData object using information from the loaded GPS data.
gpsData = scenariobuilder.GPSData(timestamps,latitudes,longitudes,altitudes)
gpsData =
GPSData with properties:
Name: ''
NumSamples: 392
Duration: 19.5498
SampleRate: 20.0513
SampleTime: 0.0500
Timestamps: [392×1 double]
Latitude: [392×1 single]
Longitude: [392×1 single]
Altitude: [392×1 single]
Attributes: []
Specify a sample time to use to uniformly sample the GPS data.
dt = 0.01; % Units are in secondsResample the GPS data with uniform sample times.
gpsDataResampled = synchronize(gpsData,SampleTime=dt);
Display the resampled GPS data. Observe that, because the sample time is shorter over the same duration, the resampled GPS data contains significantly more samples.
disp(gpsDataResampled)
GPSData with properties:
Name: ''
NumSamples: 1957
Duration: 19.5600
SampleRate: 100.0511
SampleTime: 0.0100
Timestamps: [1957×1 double]
Latitude: [1957×1 single]
Longitude: [1957×1 single]
Altitude: [1957×1 single]
Attributes: []
Load recorded GPS data into the workspace.
load("recordedGPSData.mat","X","Y","Z","timestamps")
Create a Trajectory object by using the loaded timestamps and xyz-coordinates.
traj = scenariobuilder.Trajectory(timestamps,X,Y,Z)
traj =
Trajectory with properties:
Name: ''
NumSamples: 392
Duration: 19.5498
SampleRate: 20.0513
SampleTime: 0.0500
Timestamps: [392×1 double]
Position: [392×3 double]
Orientation: [392×3 double]
Velocity: [392×3 double]
Course: [392×1 double]
GroundSpeed: [392×1 double]
Acceleration: [392×3 double]
AngularVelocity: [392×3 double]
LocalOrigin: [0 0 0]
TimeOrigin: 0
Attributes: []
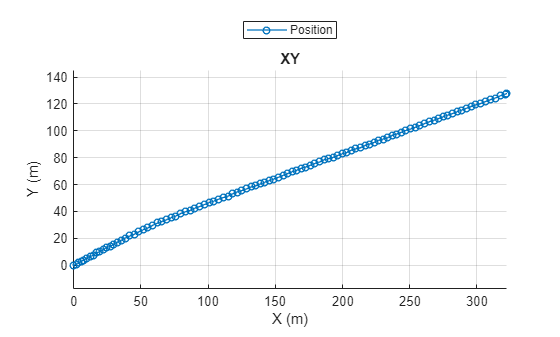
Plot the trajectory.
plot(traj)

Specify a sample rate to use to uniformly sample the trajectory data.
Fs = 5; % Units are in hertzResample the trajectory data with the specified sample rate.
synchronize(traj,SampleRate=Fs)
Display the resampled trajectory object. Observe that, because the sample rate is lower over the same duration, the resampled trajectory object contains fewer samples.
disp(traj)
Trajectory with properties:
Name: ''
NumSamples: 100
Duration: 19.8000
SampleRate: 5.0505
SampleTime: 0.2000
Timestamps: [100×1 double]
Position: [100×3 double]
Orientation: [100×3 double]
Velocity: [100×3 double]
Course: [100×1 double]
GroundSpeed: [100×1 double]
Acceleration: [100×3 double]
AngularVelocity: [100×3 double]
LocalOrigin: [0 0 0]
TimeOrigin: 0
Attributes: []
Plot the resampled trajectory.
plot(traj)
Input Arguments
Output Arguments
References
[1] Akima, Hiroshi. “A New Method of Interpolation and Smooth Curve Fitting Based on Local Procedures.” Journal of the ACM 17, no. 4 (October 1970): 589–602. https://doi.org/10.1145/321607.321609.
[2] Akima, Hiroshi. “A Method of Bivariate Interpolation and Smooth Surface Fitting Based on Local Procedures.” Communications of the ACM 17, no. 1 (January 1974): 18–20. https://doi.org/10.1145/360767.360779.
Version History
Introduced in R2024b