Annotate Video Using Detections in Vehicle Coordinates
Configure and use a monoCamera object to display information provided in vehicle coordinates on a video display.
Overview
Displaying data recorded in vehicle coordinates on a recorded video is an integral part of ground truth labeling and analyzing tracking results. Using a two-dimensional bird's-eye view can help you understand the overall environment, but it is sometimes hard to correlate the video with the bird's-eye view display. In particular, this problem becomes worse when using a third-party sensor where you cannot access the raw video captured by the sensor, and you need to use a video captured by a separate camera.
Automated Driving Toolbox™ provides the monoCamera object that facilitates the conversion between vehicle coordinates and image coordinates. This example reads data recorded by a video sensor installed on a test vehicle. Then it displays the data on a video captured by a separate video camera installed on the same car. The data and video were recorded at the following rates:
Reported lane information: 20 times per second
Reported vision objects: 10 times per second
Video frame rate: 20 frames per second
Display a Frame with Video Annotations
The selected frame corresponds to 5.9 seconds into the video clip, when there are several objects to show on the video.
% Set up video reader and player videoFile = '01_city_c2s_fcw_10s.mp4'; videoReader = VideoReader(videoFile); videoPlayer = vision.DeployableVideoPlayer; % Jump to the desired frame time = 5.9; videoReader.CurrentTime = time; frameWithoutAnnotations = readFrame(videoReader); imshow(frameWithoutAnnotations); title('Original Video Frame')
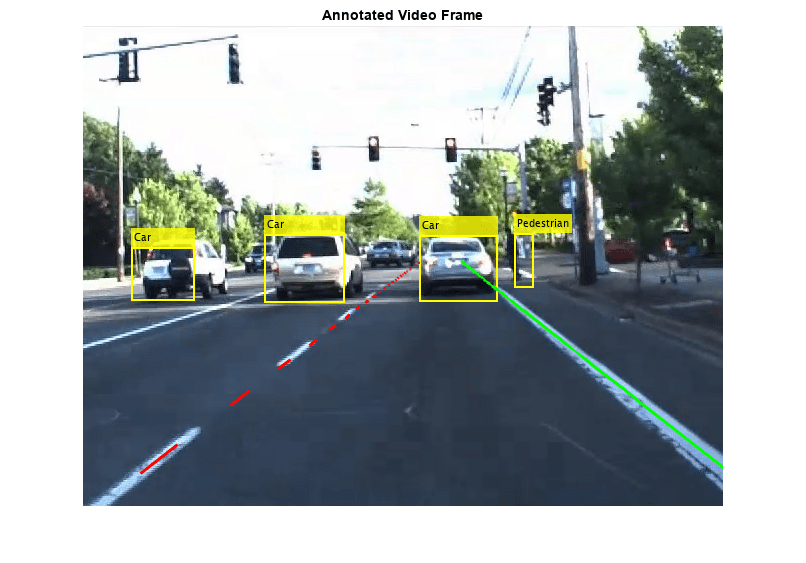
Get the corresponding recorded data.
recordingFile = '01_city_c2s_fcw_10s_sensor.mat'; [visionObjects, laneReports, timeStep, numSteps] = readDetectionsFile(recordingFile); currentStep = round(time / timeStep) + 1; videoDetections = processDetections(visionObjects(currentStep)); laneBoundaries = processLanes(laneReports(currentStep)); % Set up the monoCamera object for on-video display sensor = setupMonoCamera(videoReader); frameWithAnnotations = updateDisplay(frameWithoutAnnotations, sensor, videoDetections, laneBoundaries); imshow(frameWithAnnotations); title('Annotated Video Frame')
Display a Clip with Video Annotations
To display the video clip with annotations, simply repeat the annotation frame-by-frame. The video shows that the car pitches slightly up and down, which changes the pitch angle. No attempt has been made to compensate for this pitch motion. As a result, the conversion from vehicle coordinates to image coordinates is a little inaccurate on some of the frames.
% Reset the time back to zero currentStep = 0; % Reset the recorded data timestep videoReader.CurrentTime = 0; % Reset the video reader time while currentStep < numSteps && hasFrame(videoReader) % Update scenario counters currentStep = currentStep + 1; % Get the current time tic % Prepare the detections to the tracker videoDetections = processDetections(visionObjects(currentStep), videoDetections); % Process lanes laneBoundaries = processLanes(laneReports(currentStep)); % Update video frame with annotations from the reported objects frameWithoutAnnotations = readFrame(videoReader); frameWithAnnotations = updateDisplay(frameWithoutAnnotations, sensor, videoDetections, laneBoundaries); % The recorded data was obtained at a rate of 20 frames per second. % Pause for 50 milliseconds for a more realistic display rate. If you % process data and form tracks in this loop, you do not need this % pause. pause(0.05 - toc); % Display annotated frame videoPlayer(frameWithAnnotations); end
Create the Mono Camera for On-Video Display
The setupMonoCamera function returns a monoCamera sensor object, which is used for converting positions in vehicle coordinates to image coordinates.
Knowing the camera's intrinsic and extrinsic calibration parameters is critical to accurate conversion between pixel and vehicle coordinates.
Start by defining the camera intrinsic parameters. The parameters in this function were estimated based on the camera model. To obtain the parameters for your camera, use the Camera Calibrator app.
Because the data in this example has little distortion, this function ignores the lens distortion coefficients. The parameters are next stored in a cameraIntrinsics object.
Next, define the camera extrinsics. Camera extrinsics relate to the way the camera is mounted on the car. The mounting includes the following properties:
Height: Mounting height above the ground, in meters.
Pitch: Pitch of the camera, in degrees, where positive is angled below the horizon and toward the ground. In most cases, the camera is pitched slightly below the horizon.
Roll: Roll of the camera about its axis. For example, if the video is flipped upside down, use roll = 180.
Yaw: Angle of the camera sideways, where positive is in the direction of the positive y-axis (to the left). For example, a forward-facing camera has a yaw angle of 0 degrees, and a backward-facing camera has a yaw angle of 180 degrees.
function sensor = setupMonoCamera(vidReader) % Define the camera intrinsics from the video information focalLength = [1260 1100]; % [fx, fy] % pixels principalPoint = [360 245]; % [cx, cy] % pixels imageSize = [vidReader.height, vidReader.width]; % [numRows, numColumns] % pixels intrinsics = cameraIntrinsics(focalLength, principalPoint, imageSize); % Define the camera mounting (camera extrinsics) mountingHeight = 1.45; % height in meters from the ground mountingPitch = 1.25; % pitch of the camera in degrees mountingRoll = 0.15; % roll of the camera in degrees mountingYaw = 0; % yaw of the camera in degrees sensor = monoCamera(intrinsics, mountingHeight, ... 'Pitch', mountingPitch, ... 'Roll', mountingRoll, ... 'Yaw', mountingYaw); end
Using the Mono Camera Object to Update the Display
The updateDisplay function displays all the object annotations on top of the video frame.
The display update includes the following steps:
Using the
monoCamerasensor to convert reported detections into bounding boxes and annotating the frame.Using the
insertLaneBoundarymethod of theparabolicLaneBoundaryobject to insert the lane annotations.
function frame = updateDisplay(frame, sensor, videoDetections, laneBoundaries) % Allocate memory for bounding boxes bboxes = zeros(numel(videoDetections), 4); % Create the bounding boxes for i = 1:numel(videoDetections) % Use monoCamera sensor to convert the position in vehicle coordinates % to the position in image coordinates. % Notes: % 1. The width of the object is reported and is used to calculate the % size of the bounding box around the object (half width on each % side). The height of the object is not reported. Instead, the % function uses a height/width ratio of 0.85 for cars and 3 for % pedestrians. % 2. The reported location is at the center of the object at ground % level, i.e., the bottom of the bounding box. xyLocation1 = vehicleToImage(sensor, videoDetections(i).positions' + [0,videoDetections(i).widths/2]); xyLocation2 = vehicleToImage(sensor, videoDetections(i).positions' - [0,videoDetections(i).widths/2]); dx = xyLocation2(1) - xyLocation1(1); % Define the height/width ratio based on object class if strcmp(videoDetections(i).labels, 'Car') dy = dx * 0.85; elseif strcmp(videoDetections(i).labels, 'Pedestrian') dy = dx * 3; else dy = dx; end % Estimate the bounding box around the vehicle. Subtract the height of % the bounding box to define the top-left corner. bboxes(i,:) =[(xyLocation1 - [0, dy]), dx, dy]; end % Add labels labels = {videoDetections(:).labels}'; % Add bounding boxes to the frame if ~isempty(labels) frame = insertObjectAnnotation(frame, 'rectangle', bboxes, labels,... 'AnnotationColor', 'yellow', 'FontSize', 10, 'TextBoxOpacity', .8, 'LineWidth', 2); end % Display the lane boundary on the video frame xRangeVehicle = [1, 100]; xPtsInVehicle = linspace(xRangeVehicle(1), xRangeVehicle(2), 100)'; frame = insertLaneBoundary(frame, laneBoundaries(1), sensor, xPtsInVehicle, ... 'Color', 'red'); frame = insertLaneBoundary(frame, laneBoundaries(2), sensor, xPtsInVehicle, ... 'Color', 'green'); end
Summary
This example showed how to create a monoCamera sensor object and use it to display objects described in vehicle coordinates on a video captured by a separate camera. Try using recorded data and a video camera of your own. Try calibrating your camera to create a monoCamera that allows for transformation from vehicle to image coordinates, and vice versa.
Supporting Functions
readDetectionsFile - Reads the recorded sensor data file. The recorded data is in a single structure that is divided into four struct arrays. This example uses only the following two arrays:
laneReports, astructarray that reports the boundaries of the lane. It has these fields:leftandright. Each element of the array corresponds to a different timestep. Bothleftandrightare structures with these fields:isValid,confidence,boundaryType,offset,headingAngle, andcurvature.visionObjects, a struct array that reports the detected vision objects. It has the fieldsnumObjects(integer) andobject(struct). Each element of the array corresponds to a different timestep.objectis astructarray, where each element is a separate object with these fields:id,classification,position (x;y;z),velocity(vx;vy;vz),size(dx;dy;dz). Note:z=vy=vz=dx=dz=0
function [visionObjects, laneReports, timeStep, numSteps] = readDetectionsFile(filename) A = load(strcat(filename)); visionObjects = A.vision; laneReports = A.lane; % Prepare some time variables timeStep = 0.05; % Lane data is provided every 50 milliseconds numSteps = numel(visionObjects); % Number of recorded timesteps end
processDetections - Reads the recorded vision detections. This example extracts only the following properties:
Position: A two-dimensional
[x, y]array in vehicle coordinatesWidth: The width of the object as reported by the video sensor (Note: The sensor does not report any other dimension of the object size.)
Labels: The reported classification of the object
function videoDetections = processDetections(visionData, videoDetections) % The video sensor reports a classification value as an integer % according to the following enumeration (starting from 0) ClassificationValues = {'Unknown', 'Unknown Small', 'Unknown Big', ... 'Pedestrian', 'Bike', 'Car', 'Truck', 'Barrier'}; % The total number of objects reported by the sensor in this frame numVideoObjects = visionData.numObjects; % The video objects are reported only 10 times per second, but the video % has a frame rate of 20 frames per second. To prevent the annotations from % flickering on and off, this function returns the values from the previous % timestep if there are no video objects. if numVideoObjects == 0 if nargin == 1 % Returning a result even if there is no previous value videoDetections = struct('positions', {}, 'labels', {}, 'widths', {}); end return; else % Prepare a container for the relevant properties of video detections videoDetections = struct('positions', [], 'labels', [], 'widths', []); for i = 1:numVideoObjects videoDetections(i).widths = visionData.object(i).size(2); videoDetections(i).positions = visionData.object(i).position(1:2); videoDetections(i).labels = ClassificationValues{visionData.object(i).classification + 1}; end end end
processLanes - Reads reported lane information and converts it into parabolicLaneBoundary objects.
Lane boundaries are updated based on the laneReports from the recordings. The sensor reports the lanes as parameters of a parabolic model: %
function laneBoundaries = processLanes(laneReports) % Return processed lane boundaries % Boundary type information types = {'Unmarked', 'Solid', 'Dashed', 'Unmarked', 'BottsDots', ... 'Unmarked', 'Unmarked', 'DoubleSolid'}; % Read the recorded lane reports for this frame leftLane = laneReports.left; rightLane = laneReports.right; % Create parabolicLaneBoundary objects for left and right lane boundaries leftParams = cast([leftLane.curvature, leftLane.headingAngle, leftLane.offset], 'double'); leftBoundaries = parabolicLaneBoundary(leftParams); leftBoundaries.BoundaryType = types{leftLane.boundaryType}; rightParams = cast([rightLane.curvature, rightLane.headingAngle, rightLane.offset], 'double'); rightBoundaries = parabolicLaneBoundary(rightParams); rightBoundaries.BoundaryType = types{rightLane.boundaryType}; laneBoundaries = [leftBoundaries, rightBoundaries]; end