相机标定器
估计单目相机的几何参数
说明
相机标定器可用于估计相机内参、外参和镜头畸变参数。您可将这些相机参数用于各种计算机视觉应用。这些应用包括消除图像中的镜头畸变效果、测量平面目标或基于多个相机重新构造三维场景。
注意
请确保您使用的图像是严格按照Prepare Camera and Capture Images for Camera Calibration中概述的规范专为单目相机标定捕获的。使用为多传感器标定捕获的图像可能会导致相机内参不准确。
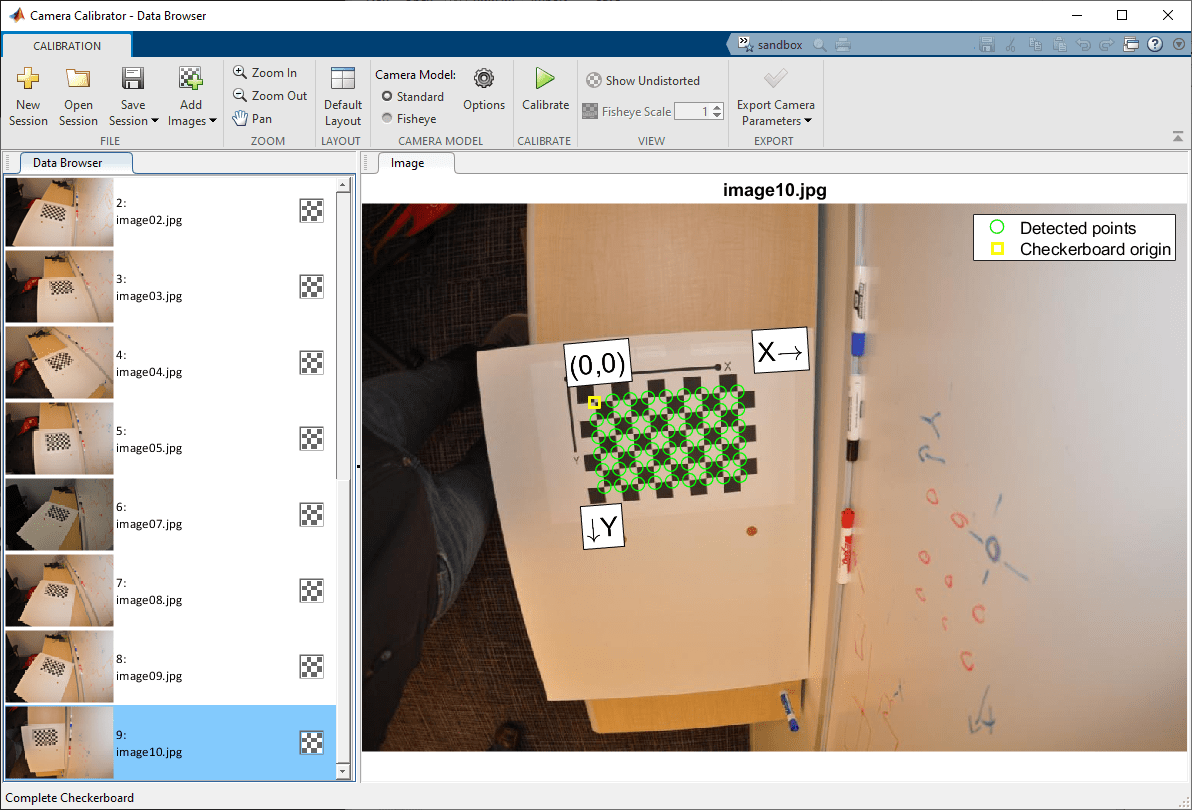
打开 相机标定器 App
MATLAB® 工具条:在 App 选项卡上的图像处理和计算机视觉下,点击 App 图标。
MATLAB 命令提示符:输入
cameraCalibrator。
示例
相关示例
编程用途
版本历史记录
在 R2013b 中推出