相机标定
函数
主题
- 什么是相机标定?
估计图像或视频摄像头的镜头与图像传感器的参数。
- What Is Robot Hand-Eye Calibration?
Understand moving- and stationary- robot camera configurations for hand-eye calibration.
- Fisheye Calibration Basics
Fisheye camera model and calibration in MATLAB.
- Using the Single Camera Calibrator App
Prepare camera calibration images and estimate camera intrinsic parameters.
- Using the Stereo Camera Calibrator App
Calibrate a stereo camera, which you can then use to recover depth from images.
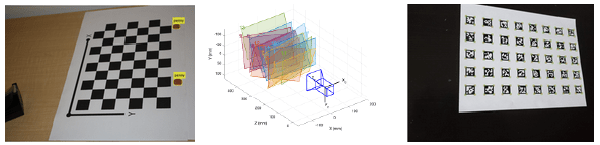
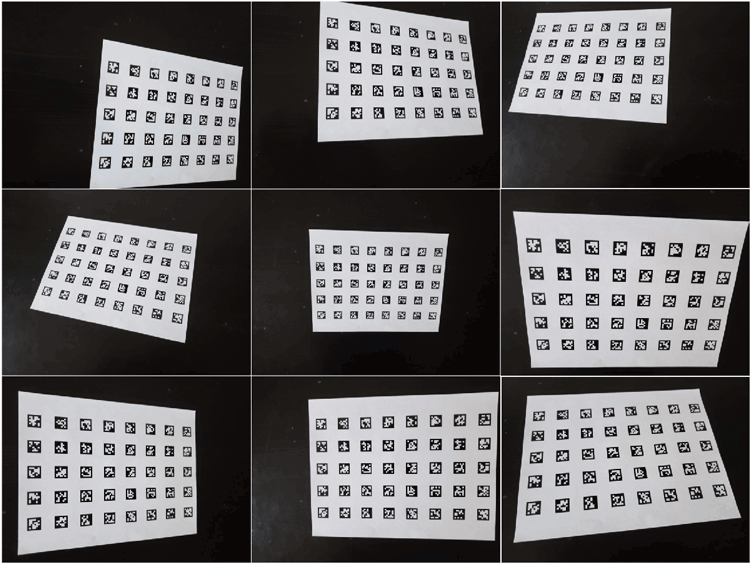
- Calibration Patterns
Camera Calibration using a checkerboard, circle grid, or custom detector pattern.
- Prepare Camera and Capture Images for Camera Calibration
Set up your camera and capture camera calibration images to use with the calibrator app.
- Point Feature Types
Choose functions that return and accept points objects for several types of features.
- 坐标系
指定像素索引、空间坐标和三维坐标系。
精选示例
3-D Motion Reconstruction Using Multiple Cameras
Reconstruct 3-D motion of an object for use in a motion capture system consisting of multiple cameras.

Stereo Fisheye Camera Calibration
Calibrate a stereo fisheye camera by determining each camera's intrinsic parameters and estimate the baseline between them.
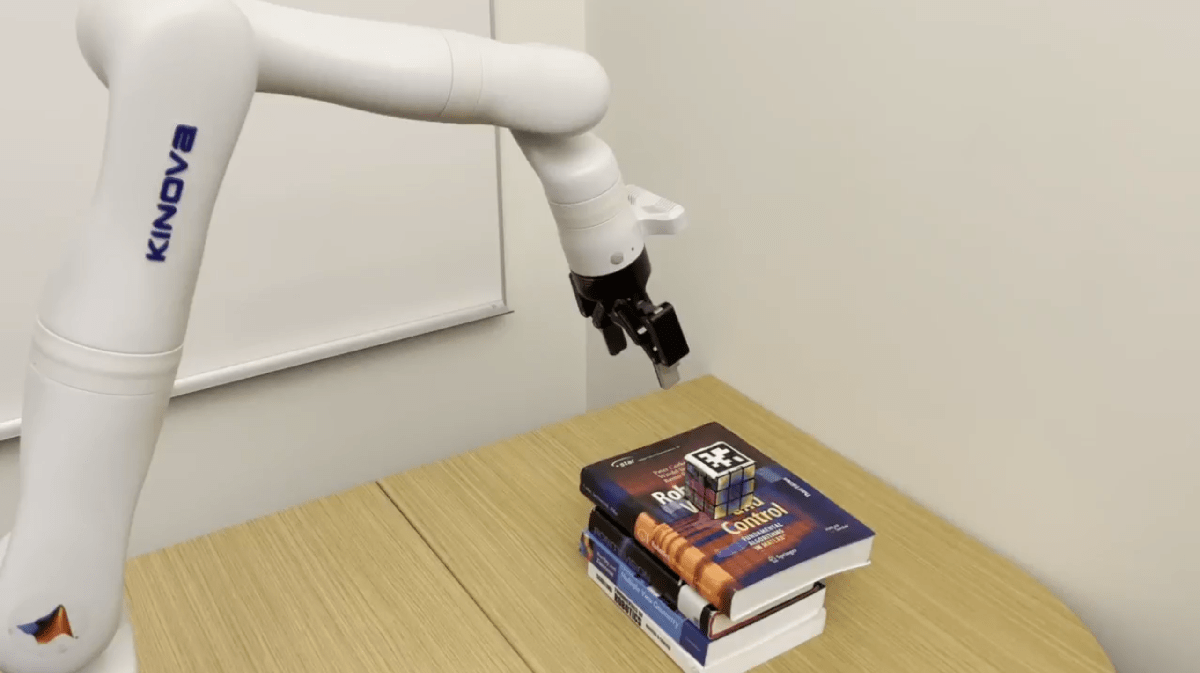
Estimate Pose of Moving Camera Mounted on a Robot
Perform and verify hand-eye calibration for a robot arm equipped with a camera.
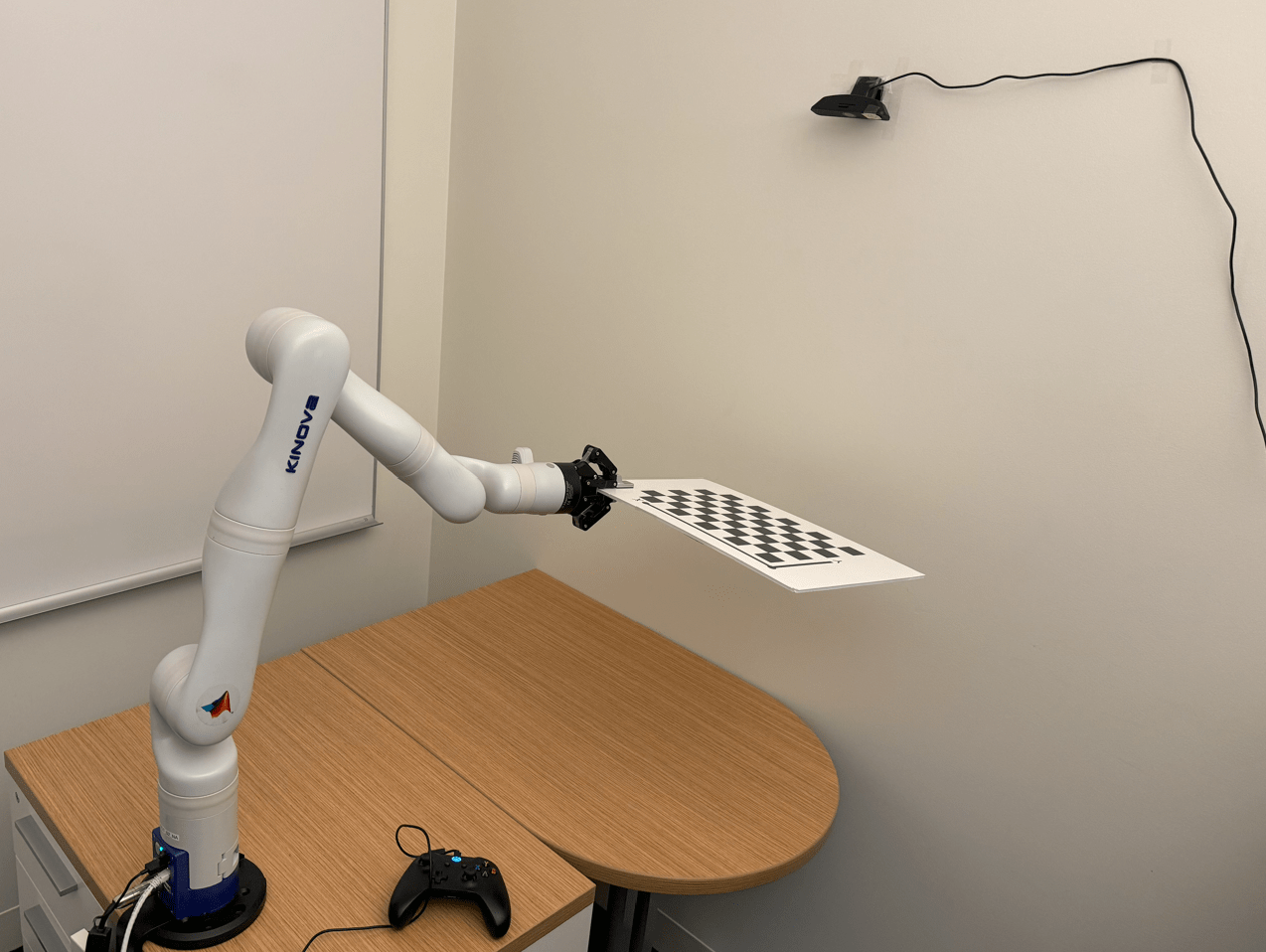
Estimate Pose of Fixed Camera Relative to Robot Base
Estimate the camera intrinsics for a fixed camera using hand-to-eye calibration.
Camera Calibration Using Custom Planar Calibration Patterns
Detect and localize AprilTags in a calibration pattern.

Evaluating the Accuracy of Single Camera Calibration
Evaluate the accuracy of estimated camera parameters.
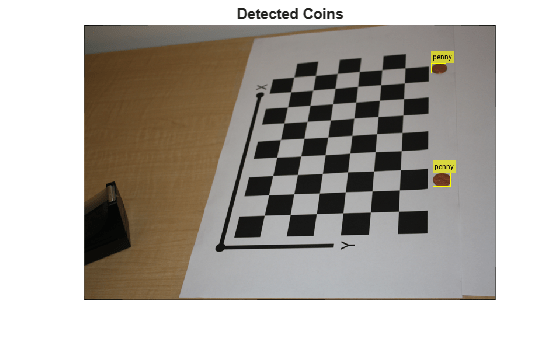
Measuring Planar Objects with a Calibrated Camera
Measure the diameter of coins in world units using a single calibrated camera.

Configure Monocular Fisheye Camera
Convert a fisheye camera model to a pinhole model.