坐标系
您可以使用各种坐标系指定图像中的位置。坐标系用于放置彼此相关的元素。像素和空间坐标系中的坐标与图像中的位置相关。三维坐标系中的坐标描述系统的三维定位和原点。
像素索引
像素坐标使您能够指定图像中的位置。在像素坐标系中,图像被视为离散元素的网格,按从上到下、从左到右进行排序。
![]()
对于像素坐标,行数 r 向下增大,而列数 c 向右增大。像素坐标是整数值,其范围是从 1 到行或列的长度。Computer Vision Toolbox™ 软件中使用的像素坐标从 1 开始,与 Image Processing Toolbox™ 和 MATLAB® 使用的像素坐标一致。有关像素坐标系的详细信息,请参阅像素索引。
空间坐标
空间坐标使您能够以比像素坐标更大的粒度指定图像中的位置。例如,在像素坐标系中,像素被视为离散单位,由整数行和列对唯一标识,例如 (3,4)。在空间坐标系中,图像中的位置用部分像素表示,例如 (3.3, 4.7)。
有关空间坐标系的详细信息,请参阅空间坐标。
三维坐标系
重建三维场景时,您可以使用两个坐标系之一定义生成的三维点。在基于相机的坐标系中,点是相对于相机的中心定义的。在基于标定模式的坐标系中,点是相对于场景中的一个点定义的。
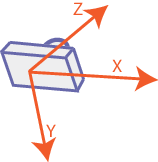
Computer Vision Toolbox 函数使用右手世界坐标系。在此系统中,x 轴指向右侧,y 轴指向下方,而 z 轴指向远离相机的方向。要显示三维点,请使用 pcshow。
基于相机的坐标系
在基于相机的坐标系中表示的点是用位于相机光心的原点来描述的。
在立体系统中,原点位于相机 1 的光心。

当您使用标定的立体相机重建三维场景时,reconstructScene 和 triangulate 函数返回原点位于相机 1 光心的三维点。当您使用 Kinect® 图像时,pcfromkinect 函数返回原点位于 RGB 相机中心的三维点。
基于标定模式的坐标系
在基于标定模式的坐标系中表示的点是用位于标定模式的 (0,0) 位置的原点来描述的。

当您从包含标定模式的多个视图重建三维场景时,生成的三维点在基于模式的坐标系中定义。Structure from Motion from Two Views示例说明如何从一对包含棋盘格的二维图像中重建三维场景。