pcfromkinect
Point cloud from Kinect for Windows
Syntax
Description
ptCloud = pcfromkinect(depthDevice,depthImage)depthDevice input
can be either a videoinput (Image Acquisition Toolbox) object
or an imaq.VideoDevice (Image Acquisition Toolbox) object
configured for Kinect (Versions 1 and 2) for Windows®.
This function requires the Image Acquisition Toolbox™ software, which supports Kinect for Windows.
ptCloud = pcfromkinect(depthDevice,depthImage,colorImage)colorImage input.
The Kinect for Windows system, designed for gaming,
produces depthImage and colorImage as
mirror images of the scene. The returned point cloud is corrected
to match the actual scene.
ptCloud = pcfromkinect(depthDevice,depthImage,colorImage,alignment)
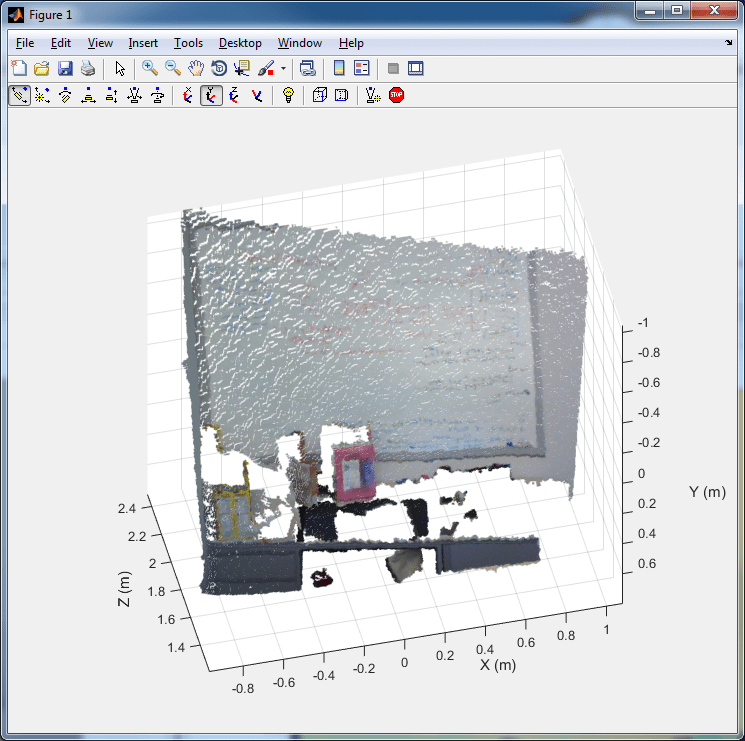
Examples
Plot a color point cloud from Kinect images. This example requires the Image Acquisition Toolbox software and the Kinect camera and a connection to the camera.
Create a System object™ for the color device.
colorDevice = imaq.VideoDevice('kinect',1)
Create a System object for the depth device.
depthDevice = imaq.VideoDevice('kinect',2)
Initialize the camera.
step(colorDevice); step(depthDevice);
Load one frame from the device.
colorImage = step(colorDevice); depthImage = step(depthDevice);
Extract the point cloud.
ptCloud = pcfromkinect(depthDevice,depthImage,colorImage);
Initialize a point cloud player to visualize 3-D point cloud data. The axis is set appropriately to visualize the point cloud from Kinect.
player = pcplayer(ptCloud.XLimits,ptCloud.YLimits,ptCloud.ZLimits,... 'VerticalAxis','y','VerticalAxisDir','down'); xlabel(player.Axes,'X (m)'); ylabel(player.Axes,'Y (m)'); zlabel(player.Axes,'Z (m)');
Acquire and view 500 frames of live Kinect point cloud data.
for i = 1:500 colorImage = step(colorDevice); depthImage = step(depthDevice); ptCloud = pcfromkinect(depthDevice,depthImage,colorImage); view(player,ptCloud); end
Release the objects.
release(colorDevice); release(depthDevice);
Input Arguments
Input video object, specified as either a videoinput (Image Acquisition Toolbox) object
or an imaq.VideoDevice (Image Acquisition Toolbox) object
configured for Kinect for Windows.
Depth image, specified as an M-by-N pixel
matrix. The original images, depthImage and colorImage,
from Kinect are mirror images of the scene.
The Kinect depth camera has limited range. The limited
range of the Kinect depth camera can cause pixel values in the depth
image to not have corresponding 3-D coordinates. These missing pixel
values are set to NaN in the Location property
of the returned point cloud.
Data Types: uint16
Color image, specified as an M-by-N-by-3
RGB truecolor image that the Kinect returns. The original images, depthImage and colorImage,
from Kinect are mirror images of the scene.
Data Types: uint8
Direction of the image coordinate system, specified as the character
vector 'colorCentric' or 'depthCentric'.
Set this value to 'colorCentric' to align depthImage with colorImage.
Set alignment to 'depthCentric' to
align colorImage with depthImage.
The origin of a right-handed world coordinate system is at the center of the depth camera. The x-axis of the coordinate system points to the right, the y-axis points downward, and the z-axis points away from the camera.

Note
For consistency across Computer Vision Toolbox™ use of coordinates systems, the coordinate system defined by this function is different from the one defined by Kinect Skeletal metadata.
Output Arguments
Version History
Introduced in R2015b
See Also
Functions
pcplayer|plot3|pcwrite|pcread|pcshow|pcmerge|scatter3|reconstructScene|triangulate|pcdownsample|pcfitplane|pcdenoise|pcregistericp|videoinput(Image Acquisition Toolbox)
Objects
pointCloud|planeModel|imaq.VideoDevice(Image Acquisition Toolbox)