pcshow
Plot 3-D point cloud
Syntax
Description
pcshow( displays
points specified by the xyzPoints)xyzPoints matrix.
pcshow( displays
the point cloud stored in the file specified by filename)filename.
pcshow(___, specifies options
using one or more name-value arguments in addition to any combination input of
arguments from previous syntaxes. For example, Name=Value)ViewPlane="XY"
sets the plane from which to visualize the point cloud as the
xy-plane.
ax = pcshow(___)
Examples
Generate a sphere consisting of 600-by-600 faces.
numFaces = 600; [x,y,z] = sphere(numFaces);
Plot the sphere using the default color map.
figure; pcshow([x(:) y(:) z(:)]) title("Sphere with Default Color Map") xlabel("X") ylabel("Y") zlabel("Z")
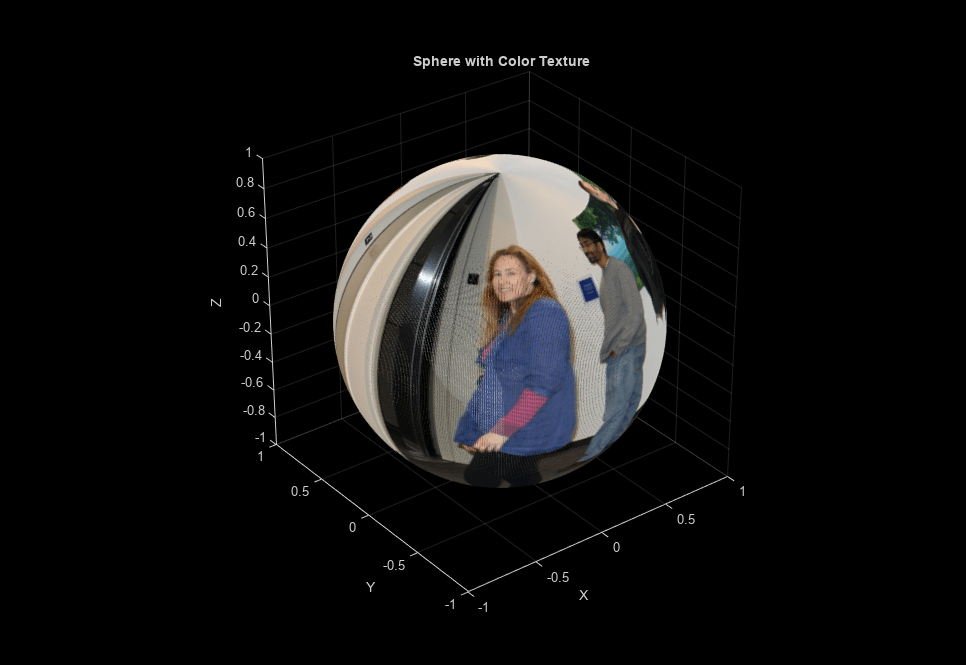
Load and display an image for texture mapping.
I = im2double(imread("visionteam1.jpg"));
imshow(I)
Resize and flip the image in preparation for mapping the coordinates.
J = flipud(imresize(I,size(x)));
Plot the sphere with the image as a color texture.
pcshow([x(:) y(:) z(:)],reshape(J,[],3)) title("Sphere with Color Texture") xlabel("X") ylabel("Y") zlabel("Z")
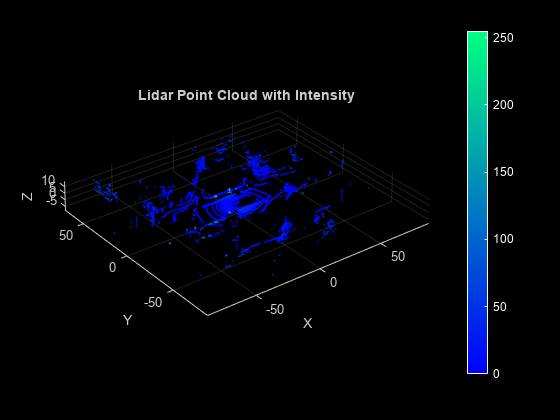
Load an organized lidar point cloud that includes intensity data.
ld = load("drivingLidarPoints.mat");Plot the point cloud and label the figure. By default, the intensity is mapped to the jet colormap.
figure pcshow(ld.ptCloud, ColorSource="Intensity") title("Lidar Point Cloud with Intensity") xlabel("X") ylabel("Y") zlabel("Z") colorbar(Color=[1 1 1]) colormap("winter")
Input Arguments
Point cloud, specified as a pointCloud object. The object
contains the locations, intensities, and RGB colors to render the point
cloud.
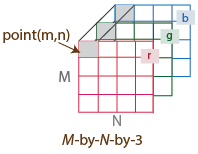
Point cloud x-, y-, and
z- locations, specified as either an
M-by-3 numeric matrix or an
M-by-N-by-3 numeric array. The
xyzPoints argument contains M or
M-by-N points in the form
[x,y,z]. The
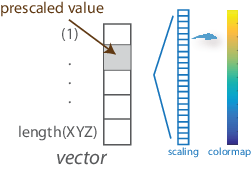
z values, which generally correspond to depth or
elevation, determine the color of each point. When you do not specify the
input color, the function maps each z value to a color in
the current colormap.
Color for points in the point cloud, specified as an RGB triplet, an M-by-3 matrix, an M-by-N-by-3 array, a short color name, a long color name, array of color names, or a cell array of color names. For details on color values, see the Color Value table.
For the
singleordoubledata type, eachcolorRGB value must be in the range [0, 1].For the
uint8data type, eachcolorRGB value must be in the range [0, 255].The function stores the
colorvalue as either an M-by-3 matrix or M-by-N-by-3 array. If you specify the color as a string or a 1-by-3 vector, the function converts it to one of these dimensions.
| Color | Format | Example |
|---|---|---|
| Specify one color for all points | short or long color name |
|
1-by-3 vector (RGB triplet) |
| |
| Specify a color for each point | string array of character vectors |
|
M-by-3 matrix, in which each row is an RGB triplet | 255 0 0 255 0 0 0 255 255  | |
M-by-N-by-3 array for an organized point cloud, containing RGB values for each point, where M-by-N is the size of the point cloud. |
|


Name-Value Arguments
Output Arguments
More About
Keyboard shortcuts are enabled only for the rotate (default) mode. To view the axes toolbar operations, point to the figure and select one of these options. Click the Restore View icon to reset the display.
![]()
| Feature | Description | ||||||
|---|---|---|---|---|---|---|---|
| Vertical Axis | Select an X-, Y-, or Z-direction to set the direction of that axis of the point cloud as the positive vertical direction. Use the keyboard arrow keys to move the point cloud with respect to the direction selected. | ||||||
| View Plane | Select the viewing angle of the point cloud figure as the XY, YX, XZ, ZX, YZ, or ZY plane. | ||||||
| Background Color | Display a color chart from which you can select a background color. | ||||||
| Axes On/Off | Turn the display axes on or off. | ||||||
| Projection | Select perspective or orthogonal view. | ||||||
| Export |
| ||||||
| Brush | Enable data brushing mode. | ||||||
| Data Tips | View the point data values of a point by selecting it in the point cloud figure. The Data Tips display shows the x, y, and z values of the points. Point clouds for depth images and lidar contain these additional data properties:
| ||||||
| Rotate 3D | Drag to rotate the point cloud figure. You can also right-click any point on the point cloud figure and select Rotate Around a Point to specify that point as the center of rotation for the figure. To return to axes rotation, right-click again and select Rotate Around Axes Center. While in Rotate 3D mode, you can also select the color source for the point cloud by right-clicking anywhere in the point cloud figure and selecting Color Source, and then selecting an option from the list. The figure applies the active colormap to the point cloud based on the values in the selected source. For a point cloud of only position data, the Color Source options are X, Y, Z, and User Specified. Point clouds for depth image and lidar data include these additional color source options:
| ||||||
| Pan, Zoom in, and Zoom out | Maneuver the point cloud in the figure, or zoom the point cloud figure in or out. | ||||||
| Restore View | Restore the original view of the axes. |
To navigate into a point cloud and observe the scene, use these keyboard shortcuts:
| Action | Keyboard Shortcut | Example |
|---|---|---|
| Move forward or backward through the scene. The camera and the target can move. | w — Forward s — Backward |
|
| Move left or right through the scene. The camera and the target can move. | a — Left d — Right | |
| Look around the scene (pitch/yaw rotation of the camera). Camera position is fixed, target moves. | Up arrow — Camera pitches up Down arrow — Camera pitches down Left arrow — Camera turns left in yaw Right arrow — Camera turns right in yaw |
|
| Roll the scene (roll rotation of the camera). | q — Camera moves clockwise. (Scene appears to move counterclockwise.) e — Camera moves counterclockwise. (Scene appears to move clockwise.) |
|
| Rotate the scene (rotate the camera around the point cloud). Camera position changes, target is fixed. | Shift + Left or Right — Camera orbits horizontally around the point cloud. (Scene appears to stand still as camera moves externally around it horizontally.) Shift + Up or Down — Camera orbits vertically around the point cloud. (Scene appears to stand still as camera moves externally around it vertically.) |
|
| Zoom in or out. | z — Zoom in x — Zoom out |
|
| Look at a view plane. | 1 — XY 2 — YX 3 — XZ 4 — ZX 5 — YZ 6 — ZY Camera positioned in the selected plane with a line of sight to the center of the plot. |
|
| Switch between rotate and pan. | Space bar — Press and hold the space bar to switch the interaction to pan. Release the space bar to switch back to rotate. |
|
| Rotate in X-, Y-, and Z- dimensions. | T — Adds rotate interaction in the third dimension. |
|


| Color Name | Short Name | RGB Triplet | Appearance |
|---|---|---|---|
"red" | "r" | [1 0 0] |
|
"green" | "g" | [0 1 0] |
|
"blue" | "b" | [0 0 1] |
|
"cyan"
| "c" | [0 1 1] |
|
"magenta" | "m" | [1 0 1] |
|
"yellow" | "y" | [1 1 0] |
|
"black" | "k" | [0 0 0] |
|
"white" | "w" | [1 1 1] |
|
Version History
Introduced in R2015bSee Also
Objects
pcviewer|pointCloud|pcplayer|planeModel
Functions
showShape|pcshowpair|plot3|pcwrite|pcread|pcmerge|scatter3|reconstructScene|triangulate|pcdownsample|pcfitplane|pcdenoise|pcregistericp