undistortFisheyeImage
Correct fisheye image for lens distortion
Syntax
Description
J = undistortFisheyeImage(I,intrinsics)I and returns the result as
image J.
[
also returns a J,camIntrinsics] = undistortFisheyeImage(I,intrinsics)cameraIntrinsics object, which
corresponds to a virtual pinhole camera.
[___] = undistortFisheyeImage(___,
specifies the interpolation method, interp)interp, using the preceding
syntaxes.
[___] = undistortFisheyeImage(___,
specifies options using one or more name-value arguments in addition to any
combination of arguments from previous syntaxes. For example,
Name=Value)"ScaleFactor"=2 increases the zoom in the camera view by a
factor of 2.
Examples
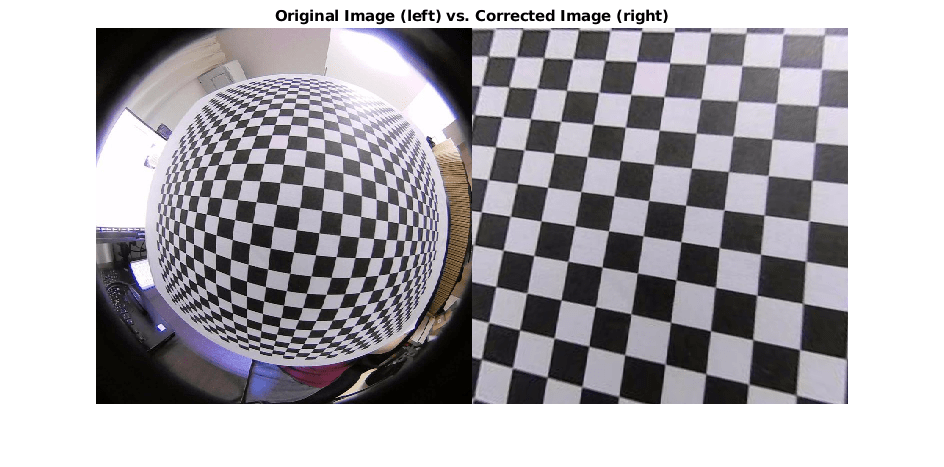
Remove lens distortion from a fisheye image by detecting a checkboard calibration pattern and calibrating the camera. Then, display the results.
Gather a set of checkerboard calibration images.
images = imageDatastore('calibrationImages');Detect the calibration pattern from the images. The 'PartialDetections' Name-Value argument is set to true by default allowing detection of partial checkerboards.
[imagePoints,patternDims] = detectCheckerboardPoints(images.Files, 'HighDistortion', true);Generate world coordinates for the corners of the checkerboard squares.
squareSize = 20; % millimeters worldPoints = patternWorldPoints('checkerboard',patternDims,squareSize);
Estimate the fisheye camera calibration parameters based on the image and world points. Use the first image to get the image size.
I = readimage(images,10); imageSize = [size(I,1) size(I,2)]; params = estimateFisheyeParameters(imagePoints,worldPoints,imageSize);
Remove lens distortion from the first image I and display the results.
J1 = undistortFisheyeImage(I,params.Intrinsics); figure imshowpair(I,J1,'montage') title('Original Image (left) vs. Corrected Image (right)')
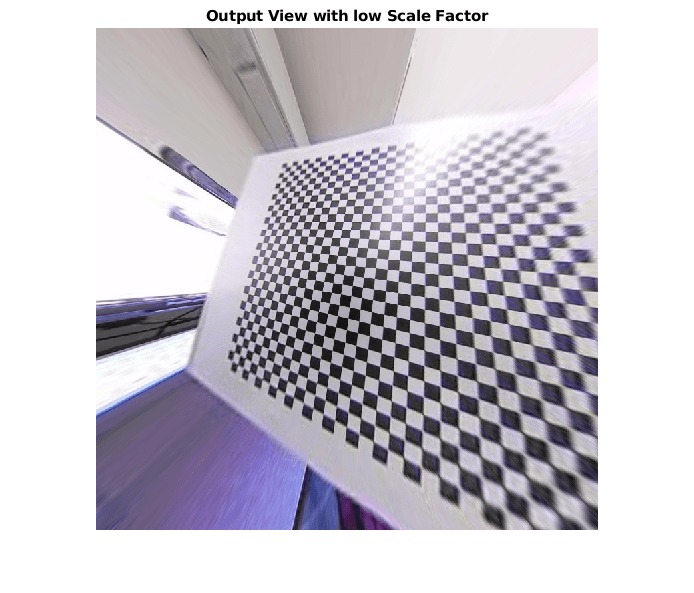
J2 = undistortFisheyeImage(I,params.Intrinsics,'OutputView','same', 'ScaleFactor', 0.2); figure imshow(J2) title('Output View with low Scale Factor')
Input Arguments
Name-Value Arguments
Output Arguments
Tips
The Computer Vision Toolbox™ calibration algorithm uses the fisheye camera model proposed by Scaramuzza [1].
References
[1] Scaramuzza, D., A. Martinelli, and R. Siegwart. "A Toolbox for Easy Calibrating Omnidirectional Cameras." Proceedings to IEEE International Conference on Intelligent Robots and Systems, (IROS). Beijing, China, October 7–15, 2006.