estimateFisheyeParameters
Calibrate fisheye camera
Syntax
Description
[
returns a fisheyeParams,imagesUsed,estimationErrors] = estimateFisheyeParameters(imagePoints,worldPoints,imageSize)fisheyeParameters object containing estimates for the intrinsic and
extrinsic parameters of a fisheye camera. The function also returns the images you
used to estimate the fisheye parameters and the standard estimation errors for the
fisheye camera calibration.
[___] = estimateFisheyeParameters(___,
specifies options using one or more name-value arguments in addition to the previous
syntax. For example, Name=Value)WorldUnits="cm" set the world units to
centimeters.
Examples
Use calibration images to detect a checkerboard calibration pattern. Calibrate the camera using corners extracted from the pattern and visualize the results of the calibration.
Load calibration images using an image datastore.
calibrationImages = imageDatastore("calibImages");
imageFileNames = calibrationImages.Files;Detect the calibration pattern from the images. The PartialDetections name-value argument is set to true by default to allow detection of partial checkerboards.
[imagePoints,patternDims,imagesUsed] = detectCheckerboardPoints(imageFileNames,HighDistortion=true);
Collect the calibration images in which checkerboards were detected.
usedImageFileNames = imageFileNames(imagesUsed); images = imageDatastore(usedImageFileNames);
Generate world coordinates for the corners of the checkerboard squares.
squareSize = 20; % millimeters worldPoints = patternWorldPoints("checkerboard",patternDims,squareSize);
Estimate the fisheye camera calibration parameters based on the image and world points.
I = readimage(images,10); imageSize = [size(I,1) size(I,2)]; params = estimateFisheyeParameters(imagePoints,worldPoints,imageSize);
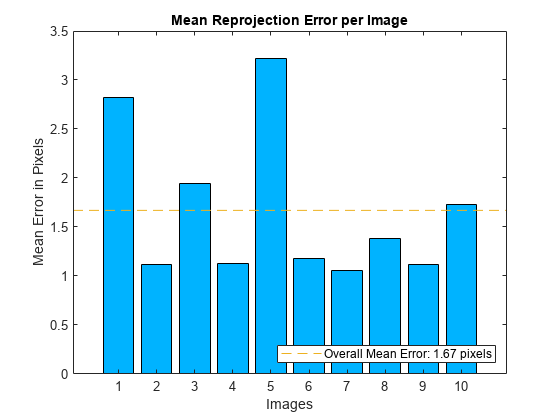
Visualize the calibration accuracy.
figure showReprojectionErrors(params);
Visualize the camera extrinsics.
figure showExtrinsics(params);

drawnow
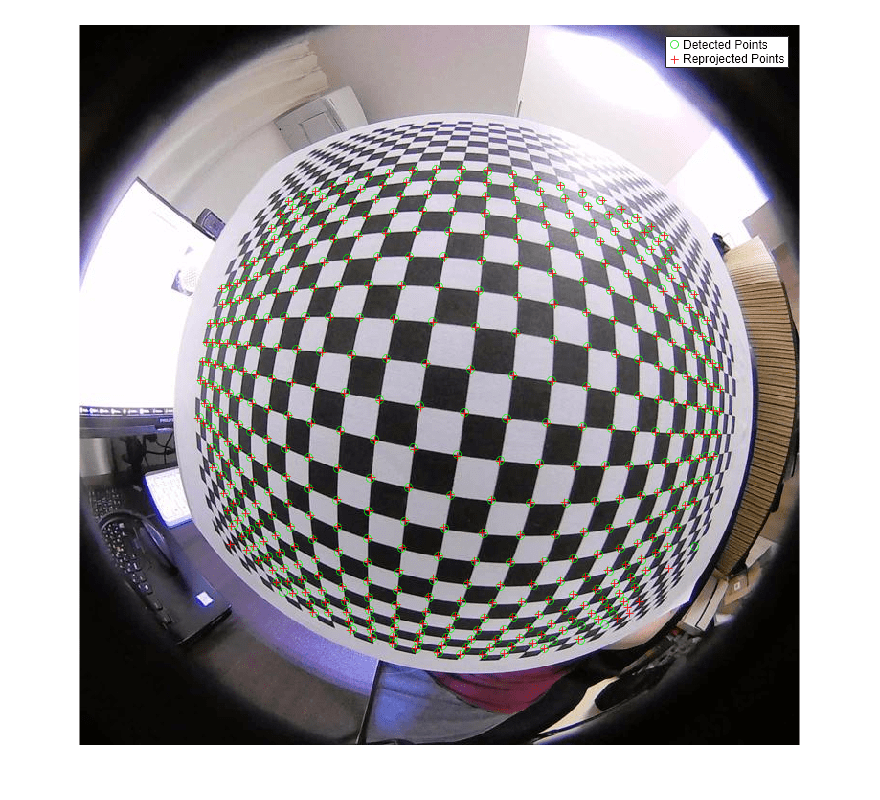
Plot the detected and reprojected points.
figure imshow(I); hold on plot(imagePoints(:,1,10),imagePoints(:,2,10),"go"); plot(params.ReprojectedPoints(:,1,10),params.ReprojectedPoints(:,2,10),"r+"); legend("Detected Points","Reprojected Points"); hold off
Input Arguments
Name-Value Arguments
Output Arguments
References
[1] Scaramuzza, D., A. Martinelli, and R. Siegwart. "A Toolbox for Easy Calibrating Omnidirectional Cameras." Proceedings to IEEE International Conference on Intelligent Robots and Systems (IROS 2006). Beijing, China, October 7–15, 2006.
[2] Urban, S., J. Leitloff, and S. Hinz. "Improved Wide-Angle, Fisheye and Omnidirectional Camera Calibration." ISPRS Journal of Photogrammetry and Remove Sensing. Vol. 108, 2015, pp.72–79.
Version History
Introduced in R2017bSee Also
Objects
fisheyeParameters|fisheyeIntrinsics|fisheyeCalibrationErrors|fisheyeIntrinsicsEstimationErrors|extrinsicsEstimationErrors
Functions
undistortFisheyePoints|detectCheckerboardPoints|generateCheckerboardPoints|showExtrinsics|showReprojectionErrors
Topics
- Fisheye Calibration Basics
- Stereo Fisheye Camera Calibration
- Configure Monocular Fisheye Camera (Automated Driving Toolbox)