estimateExtrinsics
Description
camExtrinsics
= estimateExtrinsics(imagePoints,worldPoints,intrinsics)
Examples
Create a set of calibration images.
images = imageDatastore(fullfile(toolboxdir("vision"),"visiondata", ... "calibration","slr"));
Detect the checkerboard corners in the images.
[imagePoints,patternDims] = detectCheckerboardPoints(images.Files);
Generate the world coordinates of the checkerboard corners in the pattern-centric coordinate system, with the upper-left corner at (0,0). The square size is in millimeters.
squareSize = 29; % millimeters worldPoints = patternWorldPoints("checkerboard",patternDims,squareSize);
Calibrate the camera.
I = readimage(images,1); imageSize = [size(I,1) size(I,2)]; cameraParams = estimateCameraParameters(imagePoints,worldPoints,ImageSize=imageSize); intrinsics = cameraParams.Intrinsics;
Load an image at a new location.
imOrig = readimage(images,9);
figure
imshow(imOrig)
title("Input Image")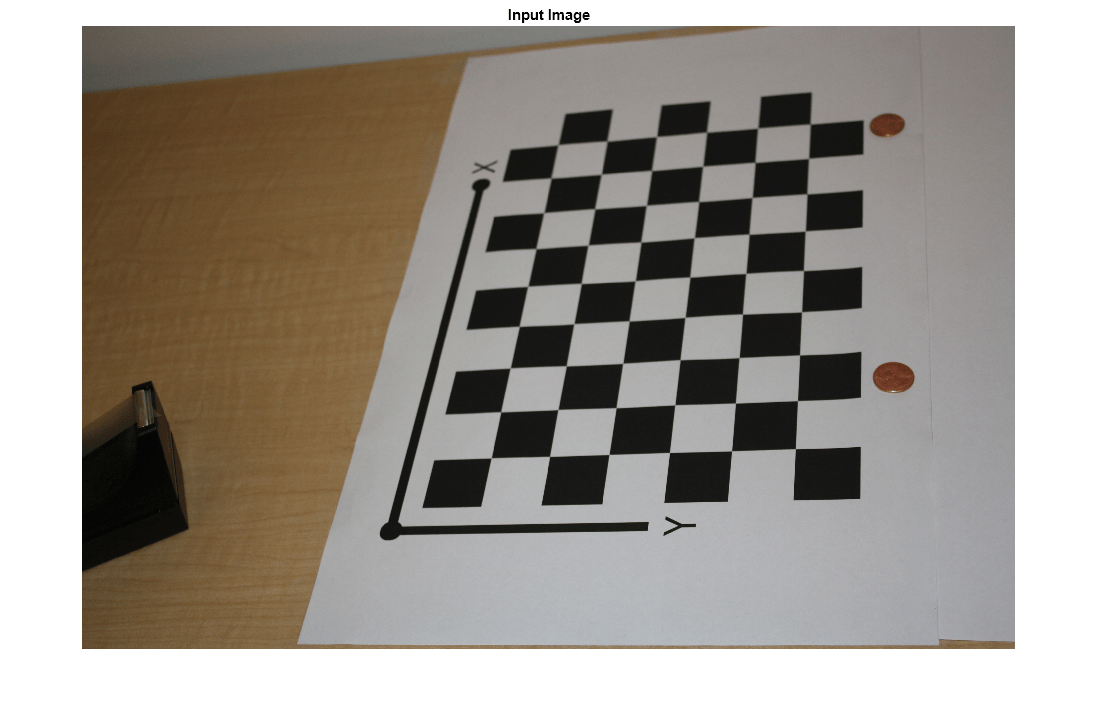
Undistort the image.
[im,newIntrinsics] = undistortImage(imOrig,intrinsics,OutputView="full");Find the reference object in the new image.
[imagePoints,patternDims] = detectCheckerboardPoints(im);
Calculate new extrinsics.
camExtrinsics = estimateExtrinsics(imagePoints,worldPoints,newIntrinsics);
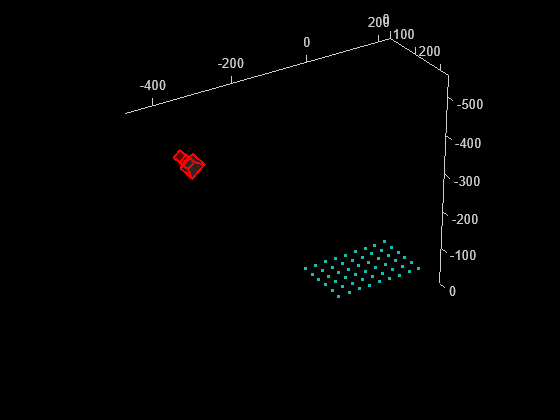
Calculate the camera pose.
camPose = extr2pose(camExtrinsics); figure plotCamera(AbsolutePose=camPose,Size=20); hold on pcshow([worldPoints,zeros(size(worldPoints,1),1)], ... VerticalAxisDir="down",MarkerSize=40);
Input Arguments
Output Arguments
Tips
This function does not account for lens distortion when
intrinsicsis acameraIntrinsicsobject. In this case, you can either undistort the image using theundistortImagefunction before detecting the points, or you can undistort the detected points using theundistortPointsfunction.
Algorithms
The estimateExtrinsics function uses two different algorithms to
compute the extrinsics depending on whether worldPoints are specified as
an M-by-2 matrix. Use an M-by-2 matrix for coplanar
points where z= 0.
The estimateExtrinsics function computes the rotation matrix and
translation vector for a single image in closed form. During calibration, the extrinsics are
estimated numerically to minimize the reprojection errors for all calibration images.
Therefore, using the estimateExtrinsics function on one of the
calibration images returns rotation matrix and translation vector slightly different from the
ones obtained during calibration.
Extended Capabilities
Version History
Introduced in R2022bSee Also
Apps
Functions
estimateCameraParameters|triangulate|undistortPoints|cameraProjection|estimateFisheyeParameters|plotCamera|img2world2d|world2img|extr2pose|pose2extr