world2img
Syntax
Description
imagePoints = world2img(worldPoints,tform,intrinsics)worldPoints into points on an image,
imagePoints, according to a rigid geometric transformation,
tform. intrinsics can be a
cameraIntrinsics, cameraIntrinsicsKB, or a
fisheyeIntrinsics object.
imagePoints = world2img(worldPoints,tform,intrinsics,ApplyDistortion=distort)cameraIntrinsics and cameraIntrinsicsKB
objects.
[
also returns the indices of valid image points that are within the boundary of the
image.imagePoints,validIndex] = world2img(___)
Examples
Create a set of calibration images.
dataDir = fullfile(toolboxdir("vision"),"visiondata", ... "calibration","slr"); images = imageDatastore(dataDir); imageSize = size(readimage(images,1));
Detect the checkerboard corners in the images.
[imagePoints,patternDims] = detectCheckerboardPoints(images.Files);
Generate the world coordinates of the checkerboard corners in the pattern-centric coordinate system, with the upper-left corner at (0,0).
squareSize = 29; % in millimeters worldPoints = patternWorldPoints("checkerboard",patternDims,squareSize);
Calibrate the camera.
cameraParams = estimateCameraParameters(imagePoints,worldPoints, ...
ImageSize=imageSize(1:2));
intrinsics = cameraParams.Intrinsics;Load the image at a new location.
imOrig = readimage(images,9); imshow(imOrig)
Undistort the image.
imUndistorted = undistortImage(imOrig,intrinsics);
Find a reference object in the new image.
[imagePoints,patternDims] = detectCheckerboardPoints(imUndistorted);
Calculate new extrinsics.
camExtrinsics = estimateExtrinsics(imagePoints,worldPoints,intrinsics);
Add a z-coordinate to the world points.
zCoord = zeros(size(worldPoints,1),1); worldPoints = [worldPoints zCoord];
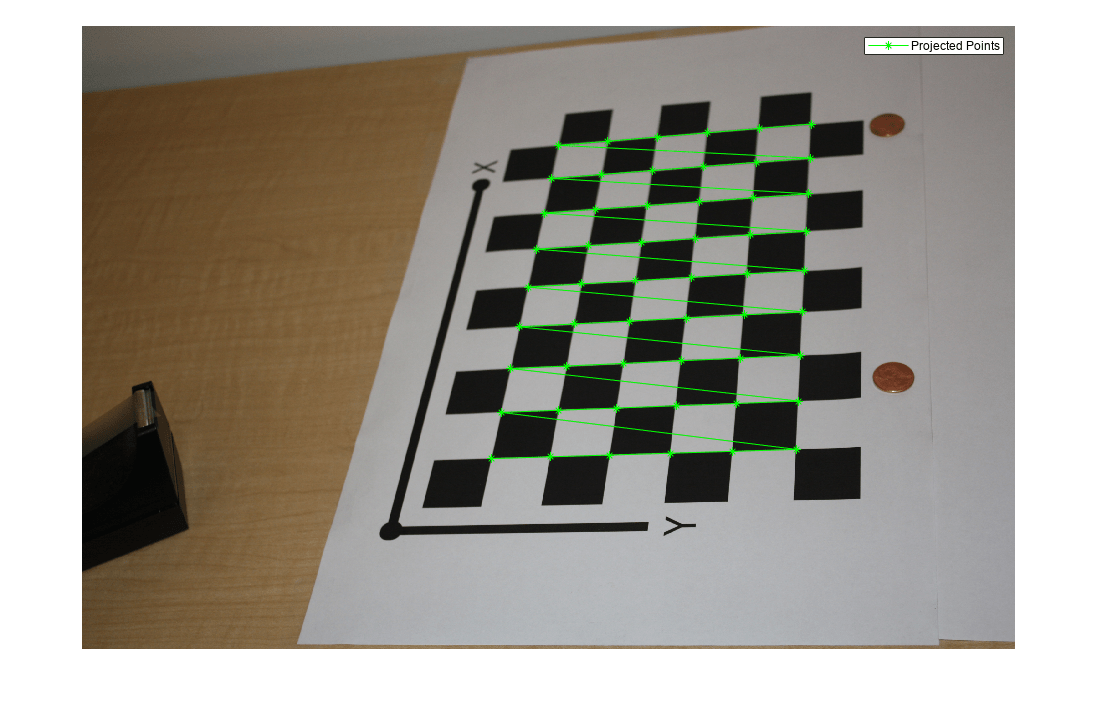
Project the world points back into the original image.
projectedPoints = world2img(worldPoints,camExtrinsics,intrinsics); hold on plot(projectedPoints(:,1),projectedPoints(:,2),"g*-"); legend("Projected Points"); hold off
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2022bSee Also
Apps
Functions
img2world2d|undistortImage|undistortPoints|estimateCameraParameters|estimateExtrinsics|estworldpose|estrelpose