立体相机标定器
估计立体相机的几何参数
说明
立体相机标定器可用于估计立体相机组中每个相机的内参和外参。您也可以使用该 App 来估计两个相机之间的平移和旋转。
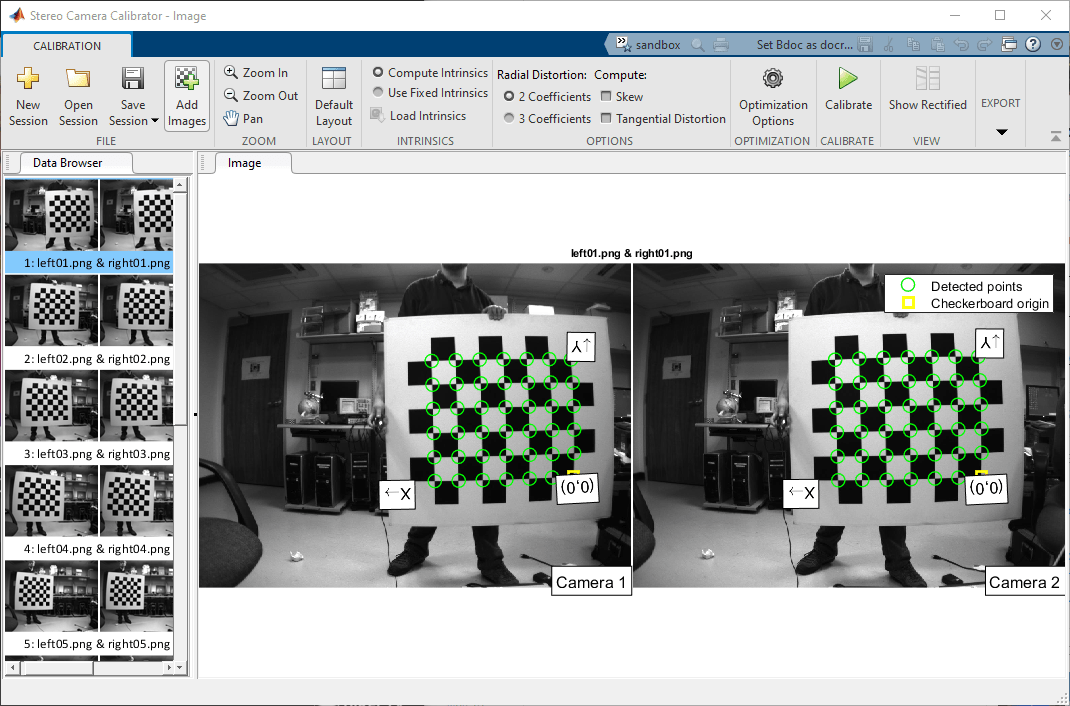
打开 立体相机标定器 App
MATLAB® 工具条:在 App 选项卡上的图像处理和计算机视觉下,点击 App 图标。
MATLAB 命令提示符:输入
stereoCameraCalibrator。
示例
相关示例
编程用途
版本历史记录
在 R2014b 中推出
估计立体相机的几何参数
立体相机标定器可用于估计立体相机组中每个相机的内参和外参。您也可以使用该 App 来估计两个相机之间的平移和旋转。
MATLAB® 工具条:在 App 选项卡上的图像处理和计算机视觉下,点击 App 图标。
MATLAB 命令提示符:输入 stereoCameraCalibrator。
在 R2014b 中推出