detectCircleGridPoints
Syntax
Description
Single Image Circle Grid Detection
imagePoints = detectCircleGridPoints(I,patternDims)I. For
more details on circle grid patterns, see Circle Grid Patterns.
[
detects a circle grid in the image files specified by imagePoints,imagesUsed] = detectCircleGridPoints(imageFileNames,patternDims)imageFileNames,
and additionally returns the list of images in which the circle grid is detected
imagesUsed.
[___] = detectCircleGridPoints(
detects a circle grid in the specified images images,patternDims)images.
Stereo Pair Circle Grid Detection
[
detects a circle grid in the stereo pairs of image files specified by
imagePoints,pairsUsed] = detectCircleGridPoints(imageFileNames1,imageFileNames2,patternDims)imageFileNames1 and imageFileNames2. The
function additionally returns a list of the pairs in which the pattern is detected
pairsUsed.
[___] = detectCircleGridPoints(
detects a circle grid in the stereo pairs of image files specified by
images1,images2,patternDims)images1 and images2.
Optional Arguments
[___] = detectCircleGridPoints(___,
specifies options using one or more name-value arguments in addition to any combination of
arguments from previous syntaxes. For example,
Name=Value)detectCircleGridPoints(I,patternDims,PatternType="symmetric")
detects a symmetric circle grid in the specified workspace.
Examples
Load an image containing a circle grid pattern into the workspace.
imageFileName = fullfile(toolboxdir("vision"),"visiondata", ... "calibration","circleGrid","mono","image08.jpg"); I = imread(imageFileName);
Define the dimensions for the circle grid pattern.
patternDims = [8 11];
Detect the circle grid points.
imagePoints = detectCircleGridPoints(I,patternDims,PatternType="symmetric")imagePoints = 88×2
395.1729 358.4451
383.5573 388.4410
370.8857 420.9698
356.9887 456.5418
341.6686 495.7388
325.0617 538.9151
306.5055 586.8763
285.8323 640.1285
436.4195 363.5016
426.5806 393.4896
415.9378 426.1730
404.2823 461.8252
391.4709 500.9889
377.3850 543.9532
361.7202 591.7051
⋮
Display the detected points on the image.
J = insertText(I,imagePoints,1:size(imagePoints,1)); J = insertMarker(J,imagePoints,"x",MarkerColor="green",Size=5); imshow(J) title("Detected a Circle Grid of Dimensions" + mat2str(patternDims))
![Figure contains an axes object. The hidden axes object with title Detected a Circle Grid of Dimensions[8 11] contains an object of type image.](../../examples/vision/win64/DetectASymmetricCircleGridInAnImageExample_01.png)
Specify your calibration images.
imageDir = fullfile(toolboxdir("vision"),"visiondata", ... "calibration","circleGrid","stereo"); leftImages = imageDatastore(fullfile(imageDir,"left")); rightImages = imageDatastore(fullfile(imageDir,"right")); images1 = leftImages.Files; images2 = rightImages.Files;
Define the dimensions for the circle grid pattern.
patternDims = [4 11];
Detect the circle grid points in the images.
[imagePoints,pairsUsed] = detectCircleGridPoints(images1,images2,patternDims);
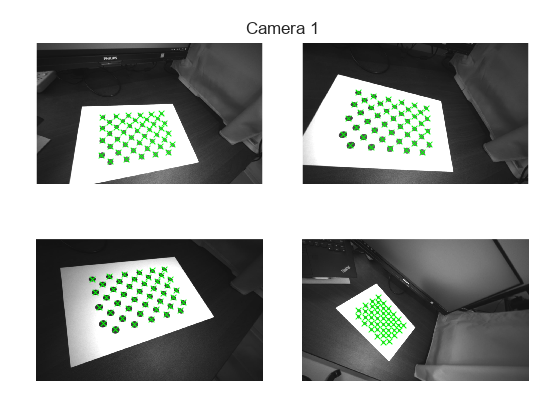
Display the points from the first four images of camera one.
figure t1 = tiledlayout(2,2,TileSpacing="compact",Padding="compact"); for i = 1:4 nexttile imshow(images1{i}) hold on plot(imagePoints(:,1,i,1),imagePoints(:,2,i,1),"gx"); end title(t1,"Camera 1")
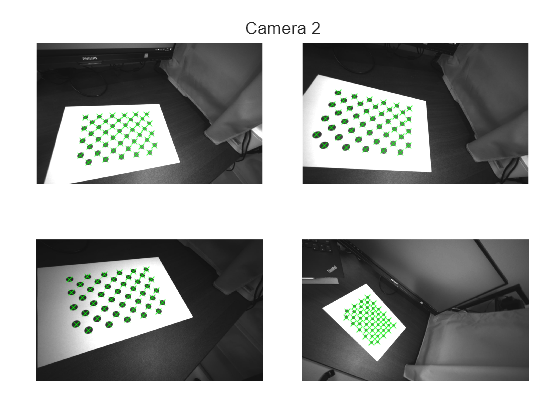
Display points from the first four images from camera two.
images2 = images2(pairsUsed); figure t2 = tiledlayout(2,2,TileSpacing="compact",Padding="compact"); for i = 1:4 nexttile imshow(images2{i}) hold on plot(imagePoints(:,1,i,2),imagePoints(:,2,i,2),"gx"); end title(t2,"Camera 2")
Input Arguments
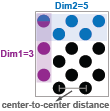
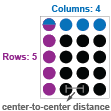
Pattern dimensions, specified as a two-element vector [nx ny], where nx is the number of circles along the x-axis and ny is the number along the y-axis in the image.
| Asymmetric | Symmetric |
|---|---|
|
|
|
Image, specified as a 2-D truecolor image or grayscale image.
Data Types: uint8 | int16 | uint16 | single | double
Images, specified as an H-by-W-by-numColorChannels-by-numImages array, where H and W describe the height and width of each image, respectively. numColorChannels is the number of color channels in each image, and numImages is the number of images.
Data Types: uint8 | int16 | uint16 | single | double
Stereo pair images from camera one, specified as an H-by-W-by-numColorChannels-by-numImages array, where H and W describe the height and width of each image, respectively. numColorChannels is the number of color channels in each image, and numImages is the number of images
Data Types: uint8 | int16 | uint16 | single | double
Stereo pair images from camera two, specified as an H-by-W-by-numColorChannels-by-numImages array, where H and W describe the height and width of each image, respectively. numColorChannels is the number of color channels in each image, and numImages is the number of images
Data Types: uint8 | int16 | uint16 | single | double
Image file names, specified as a cell array of character vectors or an array of strings.
Stereo image file names for camera one, specified as a cell array of character vectors or an array of strings.
Stereo image file names for camera two, specified as a cell array of character vectors or an array of strings.
Name-Value Arguments
Output Arguments
Algorithms
For a circle grid pattern to be detected, the pattern must:
Contain at least 16 circles
Be fully visible in the image of a single camera or in both images of a pair of stereo cameras
Each circle in the pattern must have a minimum diameter of 50 pixels for successful detection.
For additional details on circle grid patterns, see Circle Grid Patterns.
Extended Capabilities
Version History
Introduced in R2021b
See Also
Apps
Functions
generateCircleGridPoints|estimateCameraParameters|detectCheckerboardPoints|detectCharucoBoardPoints|detectAprilGridPoints|patternWorldPoints