estimateStereoBaseline
Estimate baseline of stereo camera
Syntax
Description
[
estimates the translation and orientation between two cameras of the same
resolution. stereoParams,pairsUsed,estimationErrors] = estimateStereoBaseline(imagePoints,worldPoints,intrinsics1,intrinsics2)
The estimateStereoBaseline function is best used for a stereo
system with a wide baseline when the cameras are so far apart that you cannot
capture the complete calibration pattern in the field-of-view of each camera. This
function estimates extrinsic parameters using fixed camera intrinsics that have been
estimated independently for each camera. Calibrating each camera independently
results in more precise estimates of the intrinsics.
[
specifies the units in which stereoParams,pairsUsed,estimationErrors] = estimateStereoBaseline(imagePoints,worldPoints,intrinsics1,intrinsics2,'WorldUnits',units)worldPoints are measured.
Examples
Load camera intrinsic parameters.
ld = load('wideBaselineStereo');Specify stereo calibration images.
leftImages = imageDatastore(fullfile(toolboxdir('vision'),'visiondata', ... 'calibration','wideBaseline','left')); rightImages = imageDatastore(fullfile(toolboxdir('vision'),'visiondata', ... 'calibration','wideBaseline','right'));
Detect the checkerboards.
[imagePoints,patternDims] = ...
detectCheckerboardPoints(leftImages.Files,rightImages.Files);Specify world coordinates of checkerboard keypoints.
squareSize = 29; % in millimeters worldPoints = patternWorldPoints('checkerboard',patternDims,squareSize);
Estimate the baseline and extrinsic parameters.
params = estimateStereoBaseline(imagePoints,worldPoints, ...
ld.intrinsics1,ld.intrinsics2)params =
stereoParameters with properties:
Parameters of Two Cameras
CameraParameters1: [1×1 cameraParameters]
CameraParameters2: [1×1 cameraParameters]
Inter-camera Geometry
PoseCamera2: [1×1 rigidtform3d]
FundamentalMatrix: [3×3 double]
EssentialMatrix: [3×3 double]
Accuracy of Estimation
MeanReprojectionError: 0.2586
Calibration Settings
NumPatterns: 6
WorldPoints: [54×2 double]
WorldUnits: 'mm'
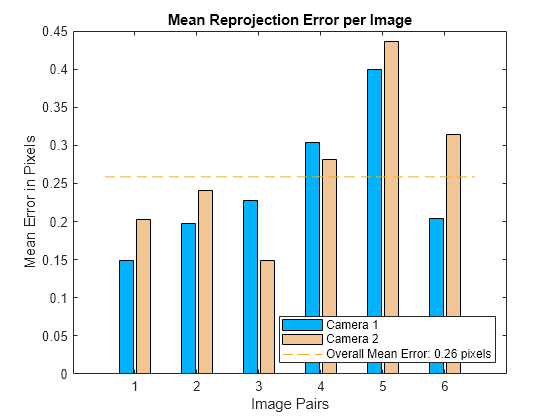
Visualize calibration accuracy.
figure showReprojectionErrors(params)
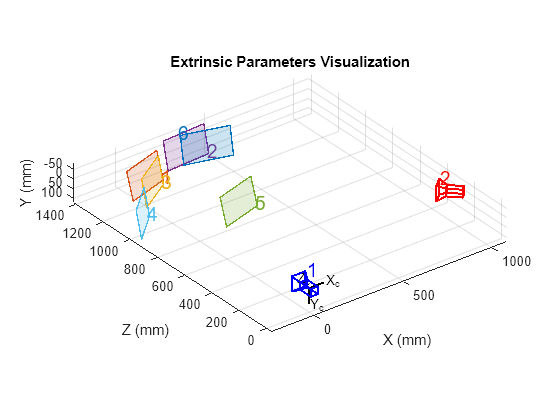
Visualize camera extrinsics.
figure showExtrinsics(params)
Input Arguments
Output Arguments
Version History
Introduced in R2018a