Computer Vision Toolbox 快速入门
Computer Vision Toolbox™ 提供用于设计和测试计算机视觉系统的算法和 App。您可以执行视觉检查、目标检测和跟踪,以及特征检测、提取和匹配。您可以自动化单目相机、立体相机和鱼眼相机的标定工作流。对于三维视觉,该工具箱支持立体视觉、点云处理、运动重建以及实时视觉和点云 SLAM。计算机视觉 App 支持基于团队的真实值自动标注,以及相机标定。
您可以使用预训练的目标检测器,或使用 YOLO、SSD 和 ACF 等深度学习和机器学习算法训练自定义检测器。对于语义和实例分割,您可以使用深度学习算法,例如 U-Net、SOLO 和 Mask R-CNN。您可以使用视觉变换器(如 ViT)执行图像分类。使用预训练模型,您可以检测人脸和行人,执行光学字符识别 (OCR) 并识别其他常见物品。
您可以通过在多核处理器和 GPU 上运行算法来提高算法的执行速度。工具箱算法支持 C/C++ 代码生成,可实现与现有代码的集成、桌面原型构建以及嵌入式视觉系统部署。
教程
- 什么是相机标定?
估计图像或视频摄像头的镜头与图像传感器的参数。
- What Is Structure from Motion?
Estimate three-dimensional structures from two-dimensional image sequences.
- 选择用于标注真值数据的 App
决定使用哪个 App 来标注真实值数据:图像标注器、视频标注器、真实值标注器、激光雷达标注器、信号标注器或医学图像标注器。
- Choose an Object Detector
Compare object detection deep learning models, such as YOLOX, YOLO v4, RTMDet, and SSD.
- Choose SLAM Workflow Based on Sensor Data
Choose the right simultaneous localization and mapping (SLAM) workflow and find topics, examples, and supported features.
- Choose a Point Cloud Viewer
Compare visualization functions.
- Get Started with Object Detection Using Deep Learning
Perform object detection using deep learning neural networks such as YOLOX, YOLO v4, RTMDet, and SSD.
- Get Started with Semantic Segmentation Using Deep Learning
Segment objects by class using deep learning networks such as U-Net and DeepLab v3+.
- Getting Started with Point Clouds Using Deep Learning
Understand how to use point clouds for deep learning.
- Local Feature Detection and Extraction
Learn the benefits and applications of local feature detection and extraction.
精选示例
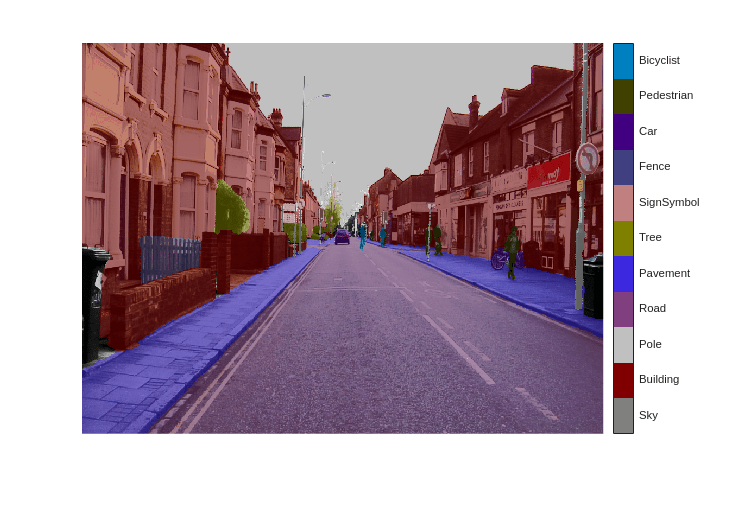
使用深度学习进行语义分割
此示例说明如何使用语义分割网络来分割图像。
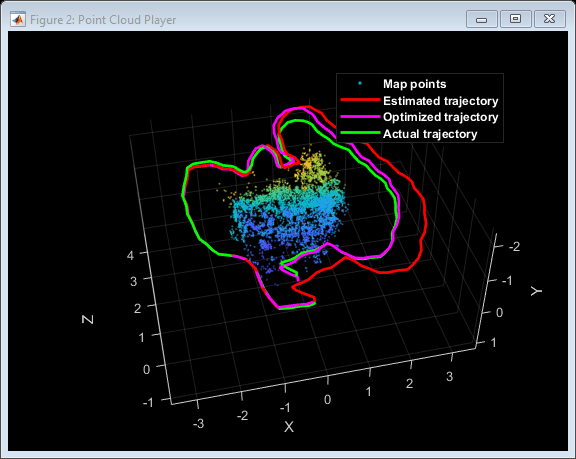
Monocular Visual Simultaneous Localization and Mapping
Visual simultaneous localization and mapping (vSLAM).

Multiclass Object Detection Using YOLO v2 Deep Learning
Train a YOLO v2 multiclass object detector and evaluate object detector performance across selected classes and overlap thresholds.
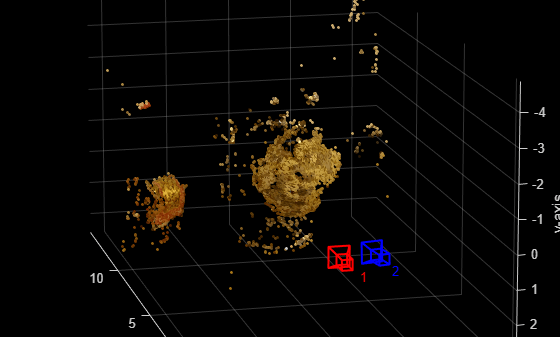
Structure from Motion from Two Views
Estimate 3-D structure of a scene from a set of 2-D images.

三维点云配准与拼接
此示例说明如何使用迭代最近点 (ICP) 算法组合多个点云以重新构造三维场景。然后,它说明如何利用点云中可用的颜色信息提升场景的准确度。

Find Object in Cluttered Scene Using Image Point Features
Detect a particular object in a cluttered scene, given a reference image of the object.
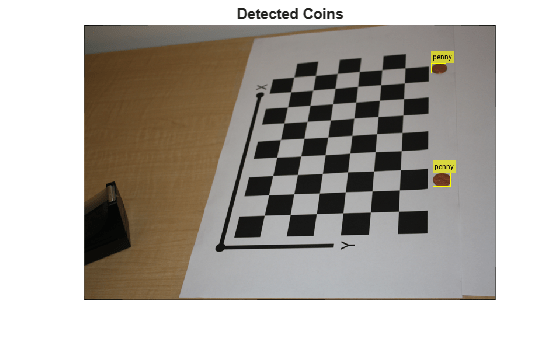
Measuring Planar Objects with a Calibrated Camera
Measure the diameter of coins in world units using a single calibrated camera.

Automatically Find Image Rotation and Scale
Demonstrates how to automatically determine the geometric transformation between two images. Specifically, when one image is distorted in relation to another due to rotation and scaling, the functions detectSIFTFeatures and estgeotform2d can be employed to identify the rotation angle and scale factor. Subsequently, these parameters can be used to transform the distorted image back to its original appearance.
Motion-Based Multiple Object Tracking
Perform automatic detection and motion-based tracking of moving objects in a video from a stationary camera.
Create Panorama
Automatically stitch multiple images into panorama. The procedure for image stitching is an extension of feature based image registration. Instead of registering a single pair of images, multiple image pairs are successively registered relative to each other to form a panorama.
交互式学习

计算机视觉入门之旅
了解如何使用 Computer Vision Toolbox 进行目标检测和跟踪。
视频

Computer Vision Toolbox 应用
设计和测试计算机视觉、三维视觉和视频处理系统

MATLAB 中的相机标定
使用相机标定器自动检测棋盘格并标定针孔和鱼眼相机