Simulate a RoadRunner Scenario Using MATLAB Functions
This example shows how to run and visualize scenarios in RoadRunner Scenario using MATLAB® functions. You can use MATLAB functions to control RoadRunner Scenario programmatically. Common programmatic tasks that you can perform include:
Open and close the RoadRunner Scenario application.
Open, close, and save scenes, scenarios, and projects.
Import and export scenarios.
RoadRunner Scenario enables you to interactively design and simulate agents in scenarios. To verify the behavior of these agents, it is often helpful to automate the process of running and analyzing the results of scenario simulations. In this example, you learn how to use Automated Driving Toolbox™ to launch RoadRunner Scenario, configure and run a simulation, and then plot simulation results.
To run this example, you must:
Have an Automated Driving Toolbox™ license.
Have a RoadRunner license and the product is installed.
Have a RoadRunner Scenario license and the product is installed.
Have created a RoadRunner project folder.
This example provides a brief description of how to set up your environment and create a connection between MATLAB and RoadRunner. For a more detailed tutorial, see Connect MATLAB and RoadRunner to Control and Analyze Simulations.
Set Up Environment to Launch RoadRunner Scenario
To use MATLAB functions to control RoadRunner Scenario programmatically, use the roadrunner object. By default, roadrunner opens RoadRunner from the default installation folder for the platform you are using (either Windows® or Linux®). These are the default installation locations by platform:
Windows – C:\Program Files\RoadRunner R20NNx\bin\win64
Linux, Ubuntu® – /usr/local/RoadRunner_R20NNx/bin/glnxa64
R20NNx is the MATLAB release you are using.
If your RoadRunner Scenario installation is at a different location than the default location, use the MATLAB settings API to customize the default value of the RoadRunner Scenario installation folder.
Open RoadRunner Scenario Session
You can use the roadrunner function to create a roadrunner object and launch a RoadRunner Scenario session. The roadrunner function requires an argument that specifies the location of a RoadRunner project. A RoadRunner project folder typically contains these subfolders: Assets, Exports, Project, Scenarios, and Scenes.
Open a project in RoadRunner using the roadrunner function by specifying the location in which to create a project. This example assumes that RoadRunner is installed in its default location in Windows.
Specify the path to an existing project. For example, this code shows the path to a project located on C:\RR\MyProject. The function returns a roadrunner object, rrApp, that provides functions for performing basic workflow tasks such as opening, closing, and saving scenes and projects.
rrProj = "C:\RR\MyProject"; rrApp = roadrunner(rrProj,InstallationFolder="C:\Program Files\RoadRunner R2025a\bin\win64");
Open an existing scenario in RoadRunner Scenario by using the openScenario function and specifying the rrApp object and the specific scenario filename that you want to open. For example, open the TrajectoryCutIn scenario file, which is a scenario included by default in RoadRunner projects. This function opens the desired scenario in the RoadRunner Scenario application through MATLAB.
openScenario(rrApp,"TrajectoryCutIn.rrscenario");Simulate Scenario
Once the scenario is loaded into RoadRunner Scenario, automate the simulation tasks by using the createSimulation function to create a ScenarioSimulation object. The ScenarioSimulation object enables you to programmatically interact with the scenario simulation.
Specify the rrApp object as an input argument to the createSimulation function. The function creates a ScenarioSimulation object, rrSim.
rrSim = createSimulation(rrApp);
Set a maximum simulation time of 10 seconds. Use the set function and specify the rrSim object, the name of the variable to set, and the value for that variable as input arguments.
maxSimulationTimeSec = 10; set(rrSim,MaxSimulationTime=maxSimulationTimeSec);
Enable simulation result logging so that you can plot the results later.
set(rrSim,Logging="on");Start the simulation. Use a while loop to monitor the status of the simulation, and wait for the simulation to complete.
set(rrSim,SimulationCommand="Start"); while strcmp(get(rrSim,"SimulationStatus"),"Running") pause(1); end
Plot Agent Velocities
In this section, you retrieve the logged velocities of the actors from the simulation and plot their magnitudes against simulation time.
Get the logged results from the scenario. Use the get function and specify the rrSim object and "SimulationLog" as input arguments. The function returns the simulation logs in simLog, which contains information about the simulation of the scenario.
simLog = get(rrSim,"SimulationLog");The TrajectoryCutIn scenario contains two actors. The red sedan has Actor ID set to 1, and the white sedan has Actor ID set to 2. Get the logged velocities of these actors from simulation log. Also, get the corresponding simulation times from the simulation logs*.*
velocityAgent1 = get(simLog,"Velocity","ActorID",1); velocityAgent2 = get(simLog,"Velocity","ActorID",2); time = [velocityAgent1.Time];
The function returns the velocities of the red sedan and the white sedan as vectors and stores them in the velMagAgent1 and velMagAgent2 variables, respectively. Calculate the magnitude of the velocity for each actor by using the norm function.
velMagAgent1 = arrayfun(@(x) norm(x.Velocity,2),velocityAgent1); velMagAgent2 = arrayfun(@(x) norm(x.Velocity,2),velocityAgent2);
Plot the agent velocities with respect to simulation time using the plot function. Label the graph and the x and y axes.
figure hold on plot(time,velMagAgent1,"r") plot(time,velMagAgent2,"b") grid on title("Agent Velocities from RoadRunner Scenario") ylabel("Velocity (m/sec)") xlabel("Time (sec)") legend("Actor ID = 1","Actor ID = 2")

Notice that the velocities of the actors correspond to their specifications in the Logic Editor of RoadRunner Scenario.
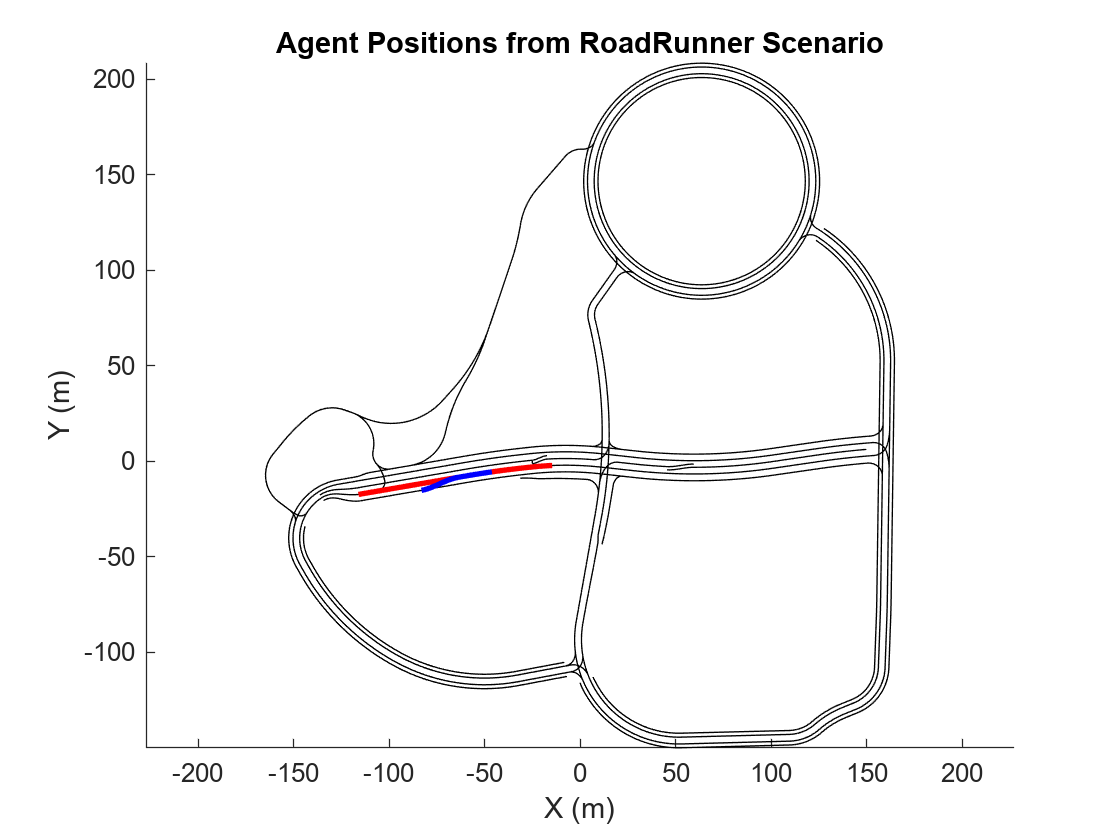
Plot Lanes
Plot the lanes from the RoadRunner scene and overlay the positions of vehicles on the map.
Get the HD Map specification from RoadRunner. Notice that the function returns a structure and one of the fields contains information about the lanes.
hdMap = get(rrSim,"Map");
lanes = hdMap.Lanes;Loop through each of the lane specifications using a for loop and plot the lane coordinates.
figure hold on for i = 1:numel(lanes) control_points = lanes(i).Geometry; x_coordinates = control_points(:,1); y_coordinates = control_points(:,2); plot(x_coordinates,y_coordinates,"black"); end axis equal

Extract the positions of the vehicles and plot them on the lanes*.*
poseActor1 = get(simLog,"Pose","ActorID",1); positionActor1_x = arrayfun(@(x) x.Pose(1,4),poseActor1); positionActor1_y = arrayfun(@(x) x.Pose(2,4),poseActor1); plot(positionActor1_x,positionActor1_y,"r",LineWidth=2) poseActor2 = get(simLog,"Pose","ActorID",2); positionActor2_x = arrayfun(@(x) x.Pose(1,4),poseActor2); positionActor2_y = arrayfun(@(x) x.Pose(2,4),poseActor2); plot(positionActor2_x,positionActor2_y,"b",LineWidth=2) title("Agent Positions from RoadRunner Scenario") ylabel("Y (m)") xlabel("X (m)")
figure(gcf)
Close Scenario Session
To stop interacting with RoadRunner Scenario, close the simulation. Then close the application.
close(rrApp)
Close the open figure.
close allFurther Exploration
In this example you learned about the basic capabilities of connecting to RoadRunner Scenario programmatically using MATLAB. To extend this script further, you can:
Vary the scenario and vehicle actors in the scenario.
Develop MATLAB and Simulink® behaviors, publish actor behavior, simulate behaviors in RoadRunner Scenario simulation, and control simulations and access simulation parameters.
See Also
roadrunner | openScenario | createSimulation | ScenarioLog | set | close | settings