Complex to Magnitude-Angle
Compute magnitude and phase angle of complex signal using CORDIC algorithm
Libraries:
DSP HDL Toolbox /
Math Functions
Description
The Complex to Magnitude-Angle block computes the magnitude and phase angle of a complex signal and provides hardware-friendly control signals. To achieve an efficient HDL implementation, the block uses a pipelined Coordinate Rotation Digital Computer (CORDIC) algorithm.
You can use this block to implement operations such as atan2 in hardware.
Note
You can also generate HDL code for this hardware-optimized algorithm, without creating a Simulink® model, by using the DSP HDL IP Designer app. The app provides the same interface and configuration options as the Simulink block.
Examples
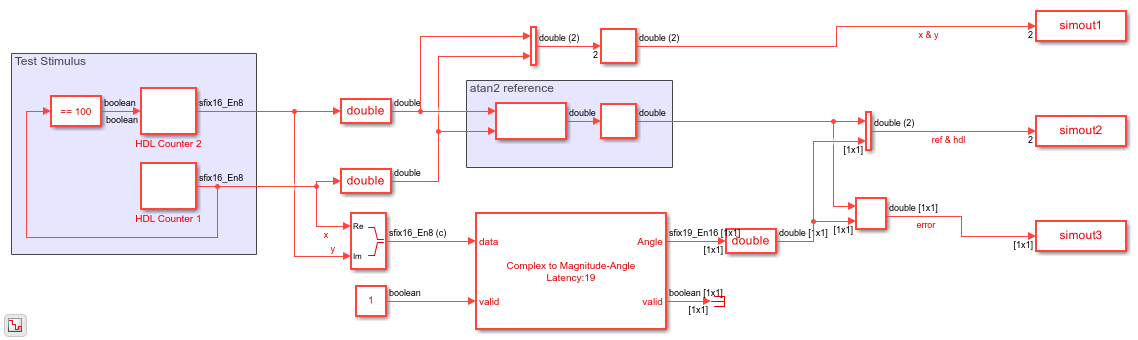
Implement atan2 Function for HDL
Implement the atan2 function in hardware by using the
Complex to Magnitude Angle block.
Ports
Input
Output
Parameters
Algorithms
The block generates a pipelined HDL architecture to maximize throughput. Each CORDIC
iteration is done in one pipeline stage. The gain factor, if enabled, is implemented with
canonical signed digit (CSD) logic by default. Set the Scaling method
parameter to Multipliers to implement the gain factor with a
multiplier.
If you use vector input, this block replicates this architecture in parallel for each element of the vector.

The following table shows Magnitude and Angle output word length (WL), for particular input word length (WL). FL stands for fractional length used in fixed-point representation.
| Input Word Length | Output Magnitude Word Length |
|---|---|
| fixdt(0,WL,FL) | fixdt(0,WL + 2,FL) |
| fixdt(1,WL,FL) | fixdt(1,WL + 1,FL) |
| Input Word Length | Output Angle Word Length | |
|---|---|---|
| fixdt([ ],WL,FL) | Radians | fixdt(1,WL + 3,WL) |
| Normalized | fixdt(1,WL + 3,WL+2) | |
The CORDIC logic at each pipeline stage implements one iteration. For each pipeline stage, the shift and angle rotation are constants.

When you set Output format to Magnitude,
the block does not generate HDL code for the angle accumulation and quadrant correction
logic.
This format normalizes the fixed-point radian angle values around the unit circle. This use of bits can be more efficient than the use of the range [0, 2π] radians. Also this normalized angle format enables wraparound of angle at 0 or 2π without additional detect and correct logic.
For example, representing the angle with 3 bits results in these normalized values.
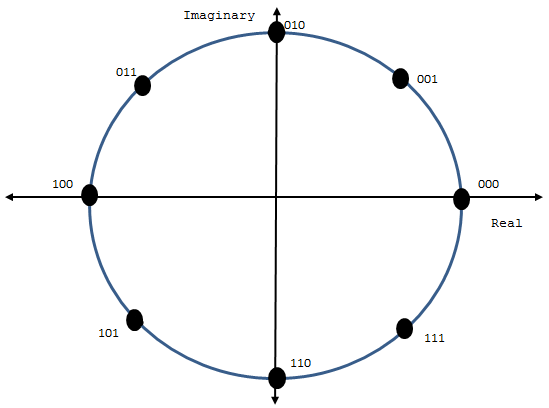
The block normalizes the angles across [0, π/4] and maps them to the correct octant at the end of the calculation.
Extended Capabilities
Version History
Introduced in R2014bSee Also
Complex to Magnitude-Angle (Simulink) | dsphdl.ComplexToMagnitudeAngle | atan2
Topics
- HDL QAM Transmitter and Receiver (Communications Toolbox)