Encoder
Libraries:
Embedded Coder Support Package for Infineon AURIX TC3x
Microcontrollers /
AURIX TC3x
Description
Add-On Required: This feature requires the Embedded Coder Support Package for Infineon AURIX TC3x Microcontrollers add-on.
Measures the rotation of the motor in ticks.
The ticks port outputs the encoder ticks count as an int32
value.
The dir port, when enabled, outputs the direction of the encoder.
0- clockwise direction.1- counter-clockwise direction.
The Encoder block is developed based on GPT12 (general purpose timer) module available in the AURIX TC3x devices, where timer T3 & T5 (slow speed calculation) is used.
Examples
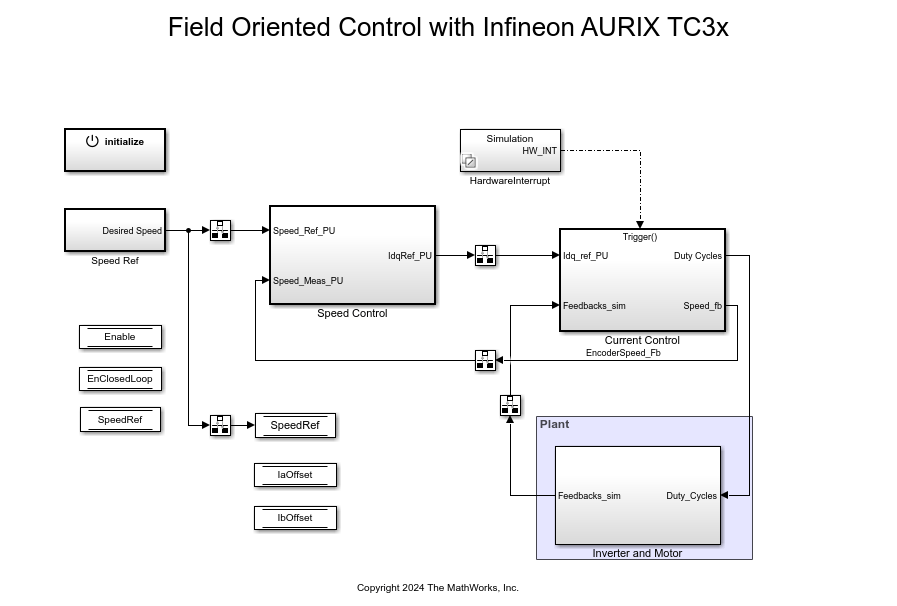
Field-Oriented Control of BLDC with Encoder Using Infineon AURIX TC3xx Microcontrollers
Implement the field-oriented control (FOC) technique to control the speed of a three-phase brushless DC (BLDC) motor. The FOC algorithm requires rotor position feedback, which is obtained by using an encoder sensor. For more details about FOC, see Field-Oriented Control (Motor Control Blockset).
Ports
Input
Output
Parameters
Version History
Introduced in R2024a