Delay
按固定或可变采样周期延迟输入信号
库:
Simulink /
Commonly Used Blocks
Simulink /
Discrete
DSP System Toolbox /
Signal Operations
HDL Coder /
Commonly Used Blocks
HDL Coder /
Discrete
Delay 模块的替代配置:
Resettable Delay
描述
Delay 模块会在一段延迟之后再输出模块的输入。此模块根据延迟长度参数的值来确定延迟时间。此模块支持:
可变延迟长度
来自输入端口的初始条件的规范
状态存储
使用环形缓冲区而不是数组缓冲区来存储状态
用外部重置信号重置初始条件的状态
利用外部使能信号控制模块在每一时间步的执行
初始模块输出取决于几个因素,例如初始条件参数和仿真开始时间等。有关详细信息,请参阅初始模块输出。外部重置参数确定模块输出是否在触发时重置为初始条件。显示使能端口参数确定是否由外部使能信号控制每一时间步的模块执行。
初始模块输出
在仿真的前几个时间步的输出取决于模块的采样时间、延迟长度和仿真开始时间。此模块支持指定或继承离散采样时间,以确定采样之间的时间间隔。有关详细信息,请参阅指定采样时间。
下表显示了 Delay 模块在采用以下设置时前几个时间步的输出。模块继承离散采样时间 [,其中 Tsampling,Toffset]TsamplingToffsetn 是延迟长度参数的值,Tstart
| 仿真时间范围 | 模块输出 |
|---|---|
| 零 |
| 初始条件参数 |
在 | 输入信号 |
使用外部使能信号时的行为
选中显示使能端口复选框将启用 Enable 端口。如果启用了使能端口,则该模块将按以下顺序运行:
检查是否满足使能条件。
如果启用了重置端口,将检查重置条件。
执行 Delay 模块功能。
该模块通过 Enable 端口执行以下操作:
当出现第一个模块使能信号时,模块输出是初始条件值 (
x0)。对于连续的使能信号,该模块取输入信号 u 的最后一个状态。
如果端口在仿真开始时未启用,则 Delay 模块输出
0。在仿真期间,如果端口在启用后变为禁用,则该模块不执行并保持其最后值。
可变大小支持
Delay 模块为可变大小信号提供下列支持:
数据输入端口
u接受可变大小信号。其他输入端口不接受可变大小信号。对于可变大小输入,输出端口与数据输入端口
u具有相同的信号维度。
对可变大小信号应用的规则取决于 Delay 模块的输入处理模式。
| 输入处理模式 | 对可变大小信号的支持规则 |
|---|---|
| 元素作为通道(基于采样) |
|
| 列作为通道(基于帧) |
|
总线支持
Delay 模块为总线信号提供下列支持:
数据输入
u接受虚拟和非虚拟总线信号。除了输入端口x0,其他输入端口不接受总线信号。初始条件
x0端口接受非虚拟总线信号。对于总线输入,输出端口与数据输入端口
u具有相同的总线类型。总线使用:
基于采样和基于帧的处理
固定和可变延迟长度
数组和环形缓冲区
要使用总线信号作为 Delay 模块的输入,请在对话框中或通过 x0 端口指定初始条件。对虚拟和非虚拟总线的支持取决于您指定的初始条件,以及状态名称参数是否为空。对于 x0 输入端口,仅支持非虚拟总线。
| 初始条件 | 状态名称 | |
|---|---|---|
| 空 | 非空 | |
| 零 | 支持虚拟和非虚拟总线 | 仅支持非虚拟总线 |
| 非零标量 | 支持虚拟和非虚拟总线 | 不支持总线 |
| 非标量 | 不支持总线 | 不支持总线 |
| 结构体 | 支持虚拟和非虚拟总线 | 仅支持非虚拟总线 |
| 非完全结构体 | 支持虚拟和非虚拟总线 | 仅支持非虚拟总线 |
字符串支持
仅在以下情况下,Delay 模块才接受和输出字符串数据类型:
模块配置为采用初始条件参数的默认值 (0)。
延迟长度值等于或小于 1。
示例
此示例显示 Delay 模块如何支持可变大小信号以实现基于采样的处理。Switch 模块控制使能子系统的输入信号是 3×3 还是 3×2 矩阵。
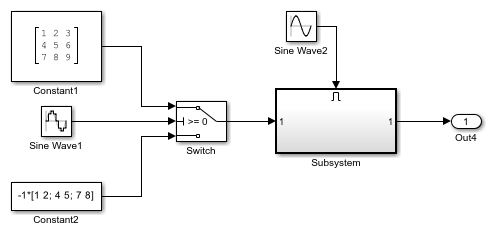
Delay 模块出现在使能子系统内部。

在使用基于采样的处理时,该模型遵循适用于可变大小信号的下列规则。
信号维度仅在启用模块时的状态重置期间发生变化。
初始条件必须为标量。
规则由以下模块实现。
Enable 模块将传播可变大小信号的大小设置为
Only when enabling。Delay 模块将初始条件设置为标量值
0.0。
此示例显示 Delay 模块如何支持总线以实现基于帧的处理。

每个 Constant 模块向 Bus Creator 模块提供一个输入信号,后者输出一个二维总线。在 Delay 模块将该总线延迟三个采样周期后,Bus Selector 模块将总线分离成两个原始信号。
该模型遵循适用于总线的下列规则:
对于初始条件,在对话框中设置值。
对于基于帧的处理,数据输入端口
u的信号维度不能大于 2。
该模型通过以下方式实现规则:
将初始条件设置为标量值
0。将 Delay 模块的总线输入设置为二维。
此示例说明如何使用使能端口来启用或禁用 Delay 模块的执行。在此模型中,斜坡输入信号馈入 Delay 模块中。该模块的执行由来自 Pulse Generator 模块的使能信号控制。


蓝线显示 Delay 模块输出延迟了一个时间步的输入信号值,而使能信号的值为 1。在 t=5 处,使能信号转变为零,Delay 模块停止执行。输出保持在最后一个值,直到模块再次被启用。