CORDIC Sigmoid HDL Optimized

库:
Fixed-Point Designer HDL Support /
Math Operations
描述
CORDIC Sigmoid HDL Optimized 模块返回 u 的 sigmoid 激活,使用针对 HDL 代码生成进行了优化的 CORDIC 实现进行计算。
示例
此示例说明如何使用 CORDIC Sigmoid HDL Optimized 模块计算给定实数值数据集的 sigmoid 激活。
算法
sigmoid 函数定义如下:
这等效于
此模块的核心算法使用双曲旋转模式下的 CORDIC 算法来计算Hyperbolic Tangent HDL Optimized (tanh)。
支持的数据类型
CORDIC Sigmoid HDL Optimized 模块支持单精度、双精度、二进制小数点定标定点和二进制小数点定标双精度数据类型进行仿真。然而,HDL 代码生成仅支持二进制小数点定标定点数据类型。
I/O 接口
当 ready 输出为高电平时,CORDIC Sigmoid HDL Optimized 模块接受数据,表示该模块已准备就绪,可以开始新计算。使用 validIn 表示有效的输入。如果模块成功注册输入值,它就会解除 ready 信号;然后您必须等待就绪信号被再次使能,才能发送新输入。以下波形图概要显示了此协议。请注意,由于模块尚未准备好开始接受输入数据,模块的第一个有效输入被丢弃。

当模块完成计算并准备发送输出时,它将在一个时钟周期内使能 validOut。然后 ready 被使能,指示模块准备就绪,可以开始接受新输入值。

对模型进行仿真
打开 CORDICSigmoidModel 模型。
mdl = 'CORDICSigmoidModel';
open_system(mdl)
该模型包含连接到数据源的 CORDIC Sigmoid HDL Optimized 模块,该模块接收一个输入数组,并在准备好接受新输入时将输入值从该数组传递给 CORDIC Sigmoid HDL Optimized 模块。为每个值计算的输出存储在工作区变量中。处理完所有输入后,仿真终止。
定义一个输入数组。
x = fi(linspace(-10,10,100));
对模型进行仿真。
sim(mdl);
仿真完成后,将创建一个新工作区变量 sigmoidOutput,用于保留为每个输入计算的值。
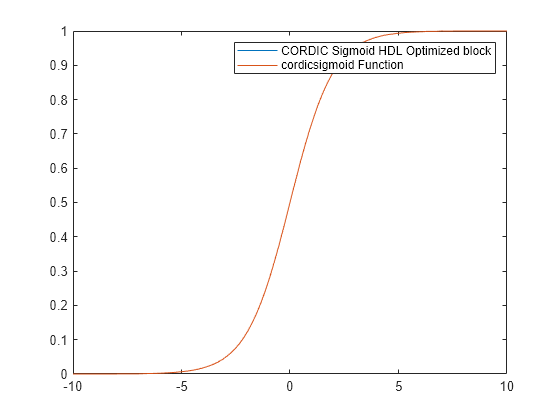
绘制输出
通过比较 CORDIC Sigmoid HDL Optimized 模块的输出与 MATLAB® cordicsigmoid 函数的输出,绘制计算的误差。
yMATLAB = cordicsigmoid(x); yMATLAB.numerictype
ans =
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 16
FractionLength: 14
sigmoidOutput.numerictype
ans =
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 16
FractionLength: 14
figure(1); plot(x, sigmoidOutput); hold on plot(x, yMATLAB); legend('CORDIC Sigmoid HDL Optimized block','cordicsigmoid Function');
验证模块输出是否与 cordicsigmoid 函数的输出在位上完全一致。
max(yMATLAB' - sigmoidOutput)
ans =
0
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 17
FractionLength: 14
端口
输入
输出
算法
当 ready 输出为高电平时,CORDIC Sigmoid HDL Optimized 模块接受数据,表示该模块已准备就绪,可以开始新计算。要向模块发送输入数据,validIn 信号必须处于使能状态。如果模块成功注册输入值,就会解除 ready 信号,然后用户必须等待就绪信号被再次使能,才能发送新输入。以下波形图概要显示了此协议。请注意,由于模块尚未准备好开始接受输入数据,模块的第一个有效输入被丢弃。

当模块完成计算并准备发送输出时,它将在一个时钟周期内使能 validOut。然后 ready 被使能,指示模块准备就绪,可以开始接受新输入值。

参考
[1] Volder, Jack E. “The CORDIC Trigonometric Computing Technique.” IRE Transactions on Electronic Computers EC-8, no. 3 (Sept. 1959): 330–334.
[2] Andraka, Ray. “A Survey of CORDIC Algorithm for FPGA Based Computers.” In Proceedings of the 1998 ACM/SIGDA Sixth International Symposium on Field Programmable Gate Arrays, 191–200. https://dl.acm.org/doi/10.1145/275107.275139.
[3] Walther, J.S. “A Unified Algorithm for Elementary Functions.” In Proceedings of the May 18-20, 1971 Spring Joint Computer Conference, 379–386. https://dl.acm.org/doi/10.1145/1478786.1478840.
[4] Schelin, Charles W. “Calculator Function Approximation.” The American Mathematical Monthly, no. 5 (May 1983): 317–325. https://doi.org/10.2307/2975781.
扩展功能
版本历史记录
在 R2024a 中推出